CFD Numerics: Numerical Schemes
Numerical schemes calculate the values for different terms like derivatives, e.g. gradient and interpolations of values from cell centers to nodes. A wide range of numerical schemes are available that provide flexibility and freedom.
| Keyword | Category of mathematical terms |
|---|---|
| interpolation schemes | point-to-point interpolations of values |
| surface normal gradient schemes | component of gradient normal to a cell face |
| gradient schemes | gradient \(∇\) |
| divergence schemes | divergence \(∇ ∙\) |
| Laplacian schemes | Laplacian \(∇^2\) |
| time differentiation schemes | first and second-time derivatives \(∂ \over\ ∂t\) ,\(∂^2 \over\ ∂^2t\) |
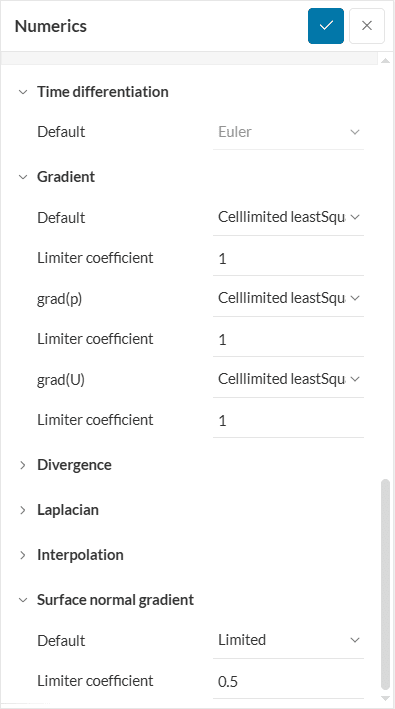
Time Differentiation
The time differentiation schemes calculate the rate of change of the variables over time. When selecting a time scheme it must be noted that a problem designed for transient analysis will not necessarily run with steady-state and visa-versa.
The table below shows all the possible types. Some may or may not be available depending upon analysis type.
| Scheme | Description |
|---|---|
| Euler | first-order, bounded, implicit |
| local Euler | local time step, first order, bounded, implicit |
| Crank Nicholson \(ψ\) | second-order, bounded, implicit |
| backward | second-order, implicit |
| steady state | does not solve for time derivatives |
The first order bounded, ‘Euler’ is the most robust while the second-order ones are more accurate. Backward is a second-order time-differentiation scheme that gives higher accuracy but may reduce stability.
Interpolation Scheme
The interpolation schemes define the terms that are interpolated values from cell centers to face centers. These are primarily used in the calculation of velocity to the face centers for the calculation of flux. There are numerous interpolation schemes but the default scheme in all the cases is the ‘Linear interpolation’ i.e a 2nd order interpolation scheme.
Gradient Schemes
The grad Schemes interpolate the values for the gradient terms in the differential equations. The discretization scheme available are listed as follows:
| Discretization scheme | Description |
|---|---|
| Gauss <interpolationScheme> | second-order, Gaussian integration |
| least squares | second-order, least squares |
| fourth gradient | fourth-order, least squares |
| celllimited <gradScheme> | cell limited version of one of the above schemes |
‘Gauss’ represents the standard finite volume discretization using the Gaussian integration that requires the interpolation from cell centers to face centers. The recommended types are the second-order accurate ‘Gauss Linear’ or ‘Least squares’ schemes.
For better stability and robustness, the ‘cellLimited’ versions of both can be used. The ‘Limiter coefficient’ of 1.0 means full boundedness/limiting of values while 0 means no limiting.
Divergence
The divergence schemes are used to calculate the convection term in the fluid dynamics differential equations \(∇ ∙(ρUU)\) :
| Scheme | Numerical behavior |
|---|---|
| linear | second-order, unbounded |
| skew linear | second-order, (more) unbounded, skewness correction |
| cubic corrected | fourth-order, unbounded |
| upwind | first-order, bounded |
| linear upwind | first/second-order, bounded |
- Gauss upwind: first-order bounded, generally robust but compromises accuracy
- Gauss linear: second-order, unbounded. Accurate but not robust
- Gauss linear upwind: second-order, upwind-biased, unbounded, that requires discretization of the velocity gradient to be specified.
- Gauss limited linear: a linear scheme that limits towards upwind in regions of rapidly changing gradient; requires a coefficient, where 1 is the strongest limiting, and shifting towards linear as the coefficient tends to 0.
- Gauss linear upwind v \(∇u\): second-order, upwind, bounded, is a good choice for stable second-order linear scheme.
Surface-normal Gradient
A surface normal gradient is calculated at a cell face and is defined as the component normal to the face, of the gradient of values at the centers of the 2 cells.
| Scheme | Description |
|---|---|
| corrected | explicit non-orthogonal correction |
| uncorrected | no non-orthogonal correction |
| limited \(ψ\) | limited non-orthogonal correction |
| bounded | bounded correction for positive scalars |
For maintaining accuracy, an explicit non-orthogonal correction can be added to the orthogonal component, known as the corrected scheme. The correction increases in size as the non-orthogonality increases.
Beyond 70°, the explicit correction can be so large that it can cause a solution to become unstable. The solution can be then stabilized by applying the limited scheme which requires a coefficient \(ψ\), 0 ≤ \(ψ\) ≤ 1, where:
- \(ψ\) = 0 : corresponds to uncorrected,
- \(ψ\) = 0.333 : non-orthogonal correction ≤ 0.5 \( \times\) orthogonal part,
- \(ψ\) = 0.5 : non-orthogonal correction ≤ orthogonal part,
- \(ψ\) = 1 : corresponds to corrected.
Usually, \(ψ\) is chosen to be 0.33 or 0.5, where:
- 0.33 offers greater stability,
- 0.5 greater accuracy.
Laplacian
The typical Laplacian term is \(∇ ∙(ν∇U)\), which is the diffusion term in the momentum equations, that is calculated by the laplacianSchemes. Only the Gauss scheme is available for discretization and further requires a selection of both an interpolation scheme for the diffusion coefficient and a surface normal gradient scheme:
Gauss <interpolationScheme> <snGradScheme>
| Scheme | Category of mathematical terms |
|---|---|
| corrected | unbounded, second-order, conservative |
| uncorrected | bounded, first order, non-conservative |
| limited \(ψ\) | blend of corrected and uncorrected |
| bounded | first-order for bounded scalars |
- Gauss linear corrected: is a 2nd order accurate with corrected gradients.
- Gauss linear limited corrected 0.5: 2nd order, corrected, with limiter value 0.5
References
Last updated: June 2nd, 2025
Did this article solve your issue?
How can we do better?
We appreciate and value your feedback.


