Static
The Static analysis type allows time-invariant calculation of displacements, stresses, and strains in one or multiple solid bodies. The results are a consequence of the applied constraints and loads, for example, bearings, gravity, forces, etc. In SimScale, Code Aster solver is used for performing static analysis.
The results enable you to evaluate whether your component is deformed in an undesired manner or if a critical stress state occurs in your geometry. Additionally, you can also iterate the design based on the simulation results and run as many simulations in parallel as you want. You can find an overview of the fields of application at the bottom of this page.
Creating a Static Analysis
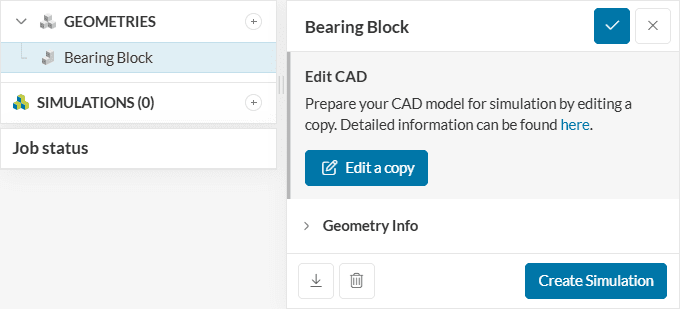
To create a static analysis, select the desired geometry, and click on ‘Create Simulation‘:
The SimScale simulation library with available analysis types appears:
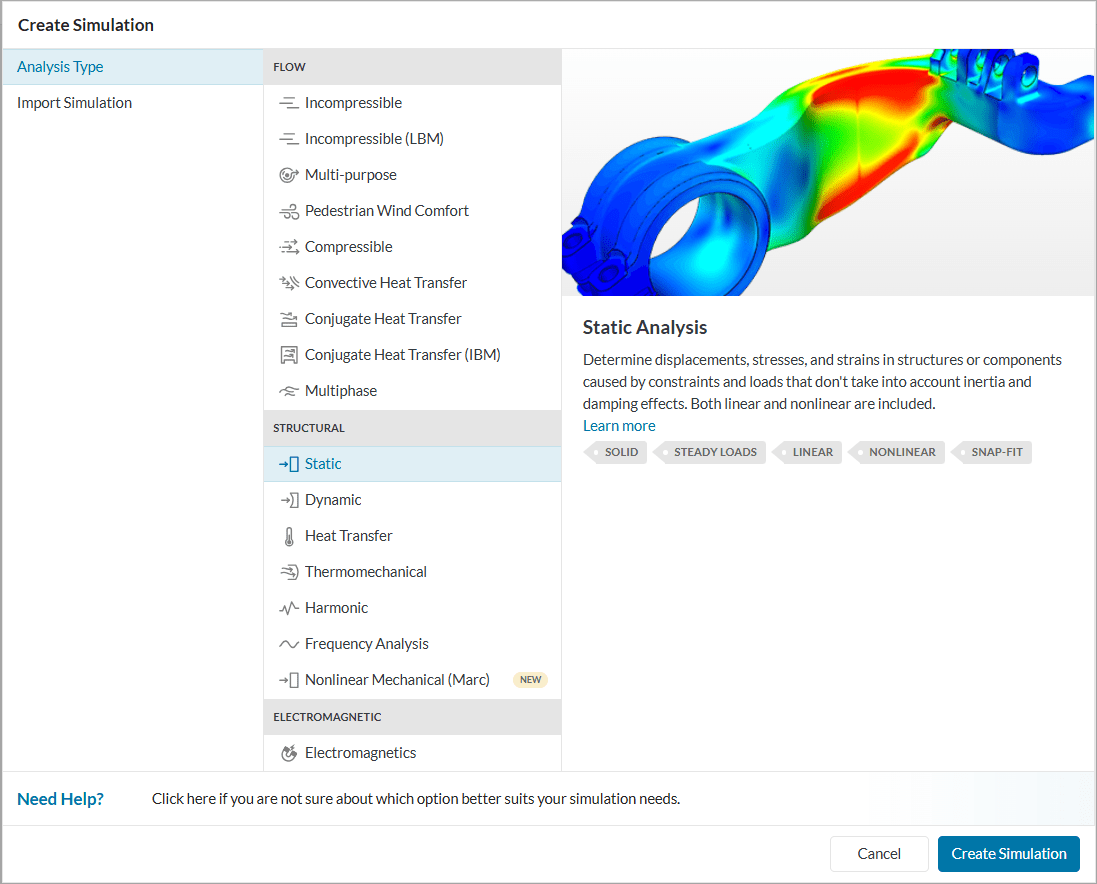
Choose the ‘Static‘ type from the list and confirm your choice by clicking the ‘Create Simulation‘ button. The following simulation tree with the corresponding settings should appear:
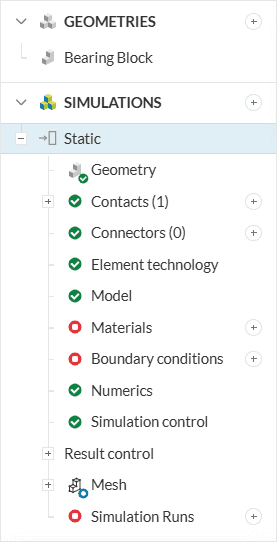
This document will describe the different simulation settings that need to be defined to run the simulation.
Global Settings
The global settings can be accessed by clicking on the simulation name, in this case, ‘Static’ in the simulation tree. Here you can define if the analysis will be linear or nonlinear. For more information, check the global settings page.
Geometry
The geometry tab contains the CAD model used for the simulation. Details of CAD handling are described in the pre-processing section. For more information on the CAD upload process and the subsequent steps please read our standard documentation.
Contacts
Assemblies of multiple bodies that are not fused together but touch each other require contact definitions. All interfaces between bodies are automatically detected and defined as a bonded contact while the simulation is being created. Sliding contact and cyclic symmetry are also available. For more information about contacts, have a look at this page.
In the physical contacts tab, you can define contact pairs of faces or face sets. Physical contacts help to model contact behavior closer to reality. At the beginning of the simulation, the faces need not touch each other, which is why the distance between these faces can be monitored during a nonlinear calculation. If they touch each other, the interaction forces that prevent those faces from interpenetrating are taken into account.
Physical contacts are only available for nonlinear analysis. The solution methods are available below:
Element Technology
Element technology refers to the numerical formulation for the solid finite element used in the simulation. This includes the mesh order, reduced integration, and mass lumping.
Model
In the Model section, one can define a gravitational load for the whole domain. Additionally, if your analysis is set to nonlinear, you can determine the geometric behavior of the model.
Materials
To define the material properties of the domain, make sure to assign exactly one material to every part. Furthermore, you can choose the material behavior describing the constitutive law that is used for the stress-strain relation and the density of the material.
Important
Initial Conditions
Defining initial conditions is only required in the case of nonlinear analysis. For a static analysis type, global and subdomain initialization can be done for displacements and stress. Please check the initial conditions page for more information.
Boundary Conditions
In a static analysis, you can define constraints and loads. Most of the time it is reasonable to establish at least one displacement constraint in every coordinate direction to determine the position or movement of the structure. Exceptions are load-based physical contact simulations, where one part might be expected to move freely due to a given load pattern.
In case of missing force boundary conditions (including gravitation), the geometry becomes load-free, and apart from the prescribed displacement boundary conditions (constraints), no deformation will evolve. However, this might be intended to determine the strain distribution e.g. in pre-clamped structural components.
For an overview of the boundary conditions available, please check this page.
Numerics
Under numerics, you can set the equation solver of your simulation. The choice highly influences the computational time and the required memory size of the simulation. For an overview of the solvers available, please check this page.
Simulation Control
The simulation control settings define the overall process of the calculation. In there you can set, for example, the time step length and the maximum runtime for your simulation to run.
Result Control
Under result control, users can specify additional parameters of interest to be calculated. Monitors can also be defined. For example, one can set area and volume average controls, as well as point data for monitoring quantities on specific points.
For more information about result controls, check this page.
Mesh
Meshing is the discretization of the simulation domain. It essentially means to split up one large problem into multiple smaller mathematical problems.
For static analysis, the standard algorithm is available. For more information about meshes, make sure to check the dedicated page.
Example Projects
- Tutorial: Linear Static Analysis of a Crane
- Sheet metal stamping process
- Rubber seal sliding analysis
Last updated: September 29th, 2025
Did this article solve your issue?
How can we do better?
We appreciate and value your feedback.


