Rotating Motion
The rotating motion boundary condition is used to define a rigid body rotation of the assigned entities. The user can define the rotation axis, the base point, and the rotation angle. Each component can be defined with a formula or table input.
This boundary condition is only available for static, dynamic, and thermomechanical analysis types. Find below its formulation and the required inputs.
If \(\mathbf{R}_{\theta}^{a}\) denotes the rotation matrix of a general rotation about the axis \(a\) with an angle of \(\theta\), then the displacement \(\vec u\) of a point \(\vec X\) is calculated as:
$$\vec{u} = \mathbf{R}_{\theta}^{a} \cdot (\vec{X}- \vec{P}_0) + \vec{P} -\vec{X}$$
where \(\vec P\) denotes the axis base point and \(\vec {P}_0\) is the position at time \(t = 0\).
Base Point
This point is the base point for the rotation axis. A possible movement of the base point regarding the initial position at time \(t = 0\) during the rotation process is taken into account.
Rotation Axis
The rotation axis is defined by its three components in the global coordinate system. The right-hand rule applies, to determine the direction of the rotation.
Important
If a component of the rotation axis is input via formula or table, then the user has to make sure that the length of the axis vector is always positive.
Rotation Angle
The rotation angle is defined in a mathematical positive sense around the rotation axis. The input can be in \(rad\) or degrees.
Important
If a continuous, transient rotation is required, then the rotation angle has to be given either as a formula or table value.
Example
In the example below, an annular ring is rotated around the z-axis. The annular face is assigned a fixed support boundary condition. The Rotation angle is specified in a table format as indicated in Figure 1 and shown in Figure 2
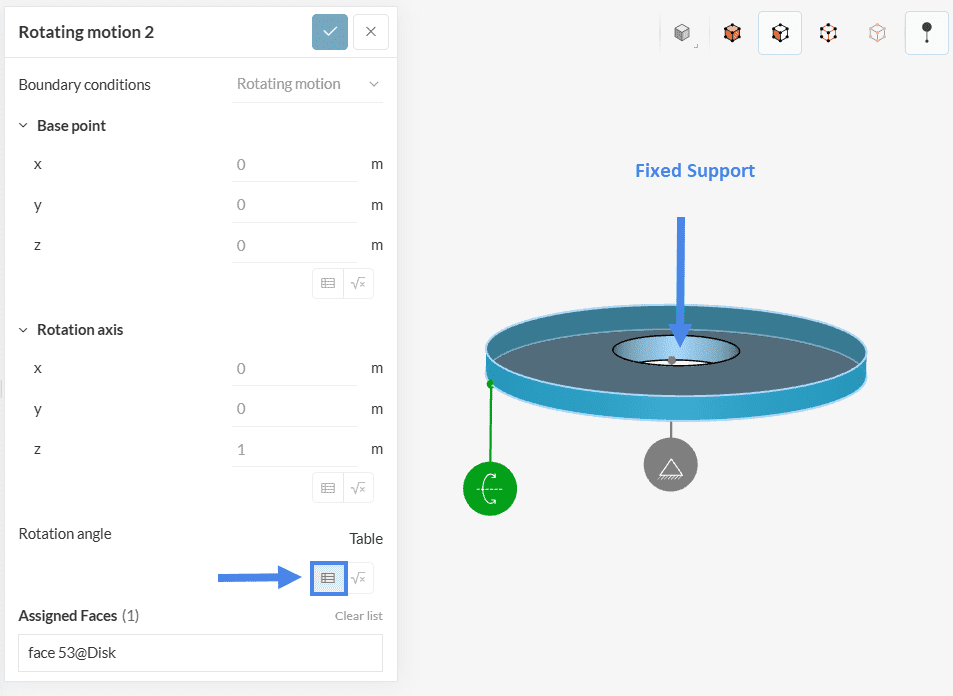
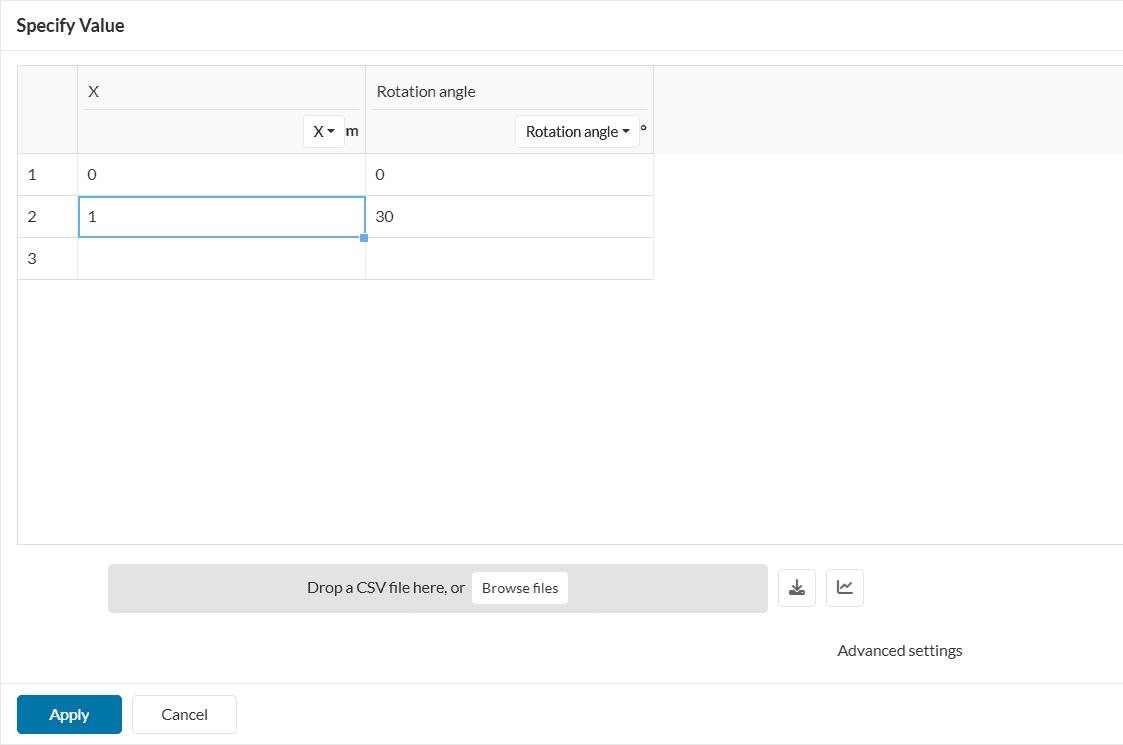
Figure 2 highlights that the annular disk is rotated by 0 degrees at time t=0 seconds and about 30 degrees at time t=1 seconds.
The animation below shows the result of a simulation with the described boundary condition:
Last updated: March 12th, 2025
Did this article solve your issue?
How can we do better?
We appreciate and value your feedback.


