SimScale Documentation
SimScale is a browser-based engineering simulation platform that provides powerful modeling, simulation, and analysis capabilities in the cloud. It eliminates the need for local hardware by providing scalable, on-demand computing capacity accessible via flexible subscription plans.
The platform integrates a broad variety of simulation tools for structural mechanics, fluid dynamics, thermodynamics, and electromagnetics. SimScale combines traditional finite element and finite volume-based solvers with advanced AI and machine learning capabilities to accelerate simulations and workflows. The SimScale team and our partners are constantly expanding the platform’s features to support advanced multiphysics applications.
Listed below you can find the most important resources of this documentation.
Getting Started With SimScale
If this is your first visit to the SimScale platform, we recommend you to take a quick tour to get to know the basics of the SimScale Community, Dashboard, and Workbench. Also, besides the SimScale Documentation pages, your should discover our tutorial section.
Platform Features
The SimScale simulation platform (“Workbench”) covers a multitude of functionalities, ranging from CAD/domain preparation tools (pre-processing) over the simulation setup interface to the online post-processor, used to visualize the simulation results. Find detailed information on the feature set of each of those components in the sections listed below.
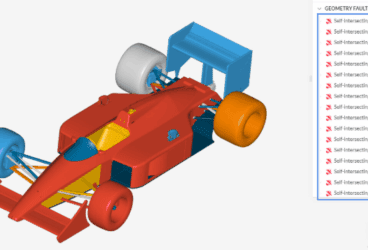
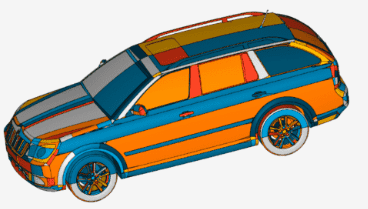
CAD Preparation (Pre-Processing)
Every simulation starts with the 3D CAD model that should be simulated. There are a few requirements the geometry needs to fulfill in order to be compatible with SimScale, as well as making sure that the simulation can be solved efficiently. Find out how to prepare your CAD model for simulation here:

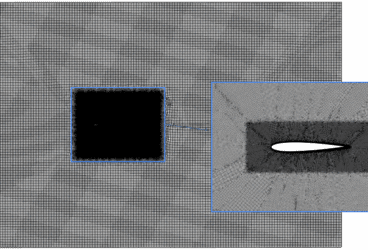
Simulation Setup
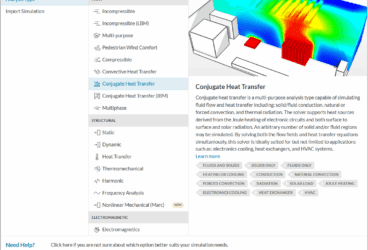
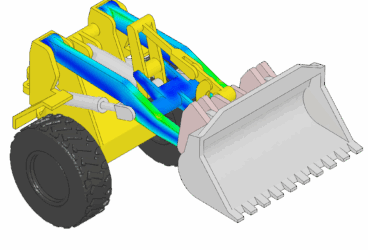
SimScale’s simulation capabilities span from finite element analysis to computational fluid dynamics and thermal analysis. This section provides an overview of the setup, supported analysis types, and an explanation of applicable conditions and control settings:
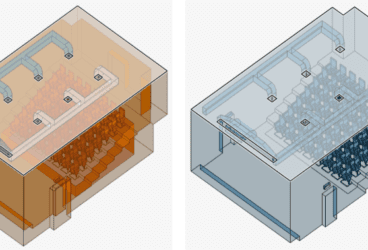
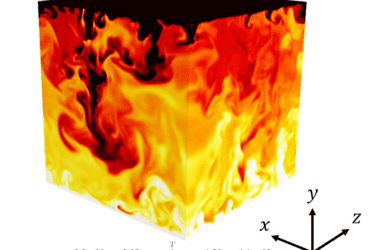
Post-Processing and Visualization
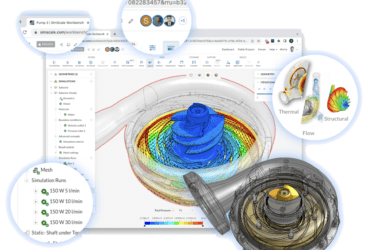
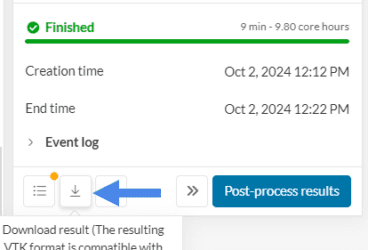
Post-processing refers to the visualization of simulation results. Depending on your simulation, the result files can exceed multiple gigabytes in size, making a powerful and reliable visualization environment essential. With the online post-processor, SimScale provides a state-of-the-art tool for visualizing simulation result data. Learn more about how to visualize your simulation results with SimScale and how to conclude design changes in the following section:
Validation Cases
Engineering simulation software is a powerful tool in any stage of the design process. However, simulation results are only as relevant as they are accurate. At SimScale, we continuously aim to improve the accuracy of all integrated solvers and analysis types. Comparing simulation results to real-world experimental data plays an important role in calibrating the simulation platform. Find out more about how SimScale validates simulation data by reviewing our validation cases in the following section:
SimWiki
If you are interested in learning the theoretical basics of how engineering simulation software works, check out the SimScale SimWiki:
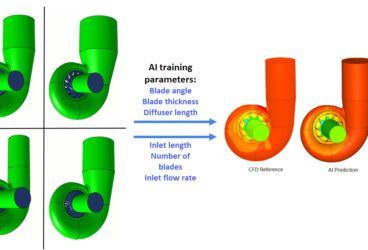
AI Model Training
Engineers can train AI models to simulate to augment their existing workflows. These models enable organizations to explore design spaces within seconds, providing valuable insight and direction to design processes.
Troubleshooting and Support
Getting started with engineering simulation can be challenging. If you encounter a bug or get stuck when setting up your simulation and the SimScale Documentation doesn’t help, feel free to contact support anytime. We will do our best to help you as soon as possible. Find out how to troubleshoot the most common issues and how to reach our support in the sections listed below:
Last updated: January 10th, 2026
Did this article solve your issue?
How can we do better?
We appreciate and value your feedback.
What's Next
Platform Introductionpart of: SimScale Documentation


