Damping
In a dynamic simulation, damping means energy dissipated out of the system. Damping in FEA is used for two main reasons: numerical damping and material damping. We will go through them in this document.
Defining Damping in the Workbench
Damping is only available for two analysis types: Dynamic and Harmonic. The configuration is made for all materials in the Global Physics section, or materials specific in the Materials section:
Numerical Damping
Numerical damping in FEA is connected to the numerical time integration scheme (implicit and explicit) that is used to predict the temporal evolution of the system.
In SimScale there are non-dissipative (no damping) as well as dissipative time schemes available. The main disadvantage of dissipative time schemes is that they reduce the accuracy of the solution, as energy conservation can not be ensured.
On the other hand, energy dissipation is often needed to reduce unphysical oscillations of the system and even enable the convergence of the solution. Often, the user has to make a compromise between accuracy and robustness.
Global Material Damping
Under the Global physics settings, the user can enable global damping as shown in Figure 2. This allows assigning a Damping level in a percentage of the critical damping and will be applied to all parts without a material-specific damping setting.

This setting is available only for the Harmonic analysis type.
Critical Damping
Critical damping describes the minimum damping value, that prevents oscillation of the system. As in a harmonic analysis oscillation of the system is desired, it is recommended that the global value should be smaller than 15% of the critical damping.
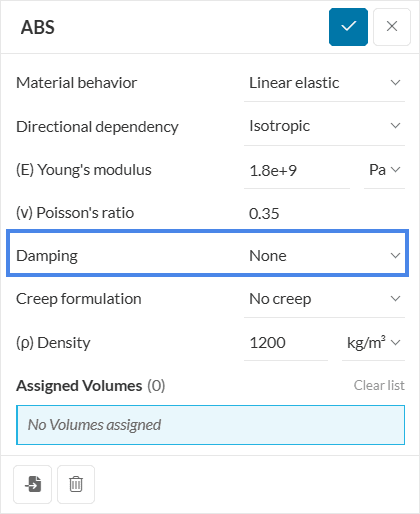
Specific Material Damping
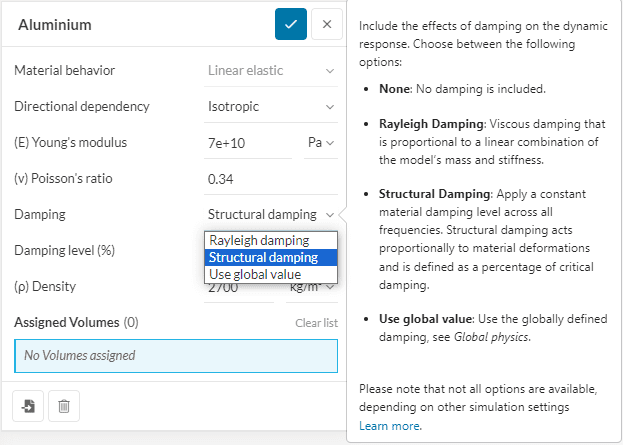
The material damping has its origin in the physical behavior of the material. Damping (and thus energy dissipation) is observed due to internal friction of the material. Several models are available in SimScale to mimic this behavior.
Global Damping
When specified in the Global Physics settings this value is used for the material.
None
When Global Damping is not activated, select this option to prevent damping due to material properties.
Rayleigh Damping Model
Rayleigh damping, which is also known as proportional viscous damping, assumes that the damping is proportional to the vibrating velocity. With the damping matrix \(\mathbf{C}\), the system equation reads as:
$$\mathbf{M} \ddot{\vec{u}}+\mathbf{C}\dot{\vec{u}}+\mathbf{K}\vec{u} = \vec{f} \tag{1}$$
Where,
- \(\mathbf{M}\) is the mass matrix
- \(\mathbf{C}\) is the damping matrix
- \(\mathbf{K}\) is the stiffness matrix
- \(\vec{f}\) is the force vector
- \(\ddot{\vec{u}}, \dot{\vec{u}}, \vec{u}\) are the resulting acceleration, velocity and displacement vectors
The damping effect of the Rayleigh damping is controlled by two parameters: \(\alpha\) and \(\beta\). The viscous damping matrix \(\mathbf{C}\) has the form:
$$\mathbf{C} = \alpha\mathbf{K} + \beta\mathbf{M} \tag{2}$$
where \(\alpha\) is stiffness-proportional damping coefficient \([seconds]\) and \(\beta\) is mass-proportional damping \([1/seconds]\).
Structural Damping Model
Structural damping is also known as hysteretic damping. Here the damping is assumed to be proportional to the displacement. The damping effect is controlled by specifying the Damping Level based on the percentage of the critical damping.
Important
The hysteretic damping model is only available for harmonic analysis.
Last updated: May 14th, 2025
Did this article solve your issue?
How can we do better?
We appreciate and value your feedback.


