Eddy Viscosity
Eddy viscosity is a model viscosity. It is used to account for the effects lost in averaging the turbulent effects in a CFD simulation. More specifically, it models the transport and dissipation of energy that was neglected as a result of turbulence modeling. These turbulence models are abstract fundamental equations that predict the mathematical development of turbulent flows \(^1\).
Eddy viscosity is the proportionality factor describing the turbulent transfer of energy as a result of moving eddies, giving rise to tangential stresses.\(^2\)
It is also referred to as turbulent viscosity and doesn’t have any physical existence.
One can, thus, express the effective viscosity of the fluid flow as:
$$ \nu_{eff} = \nu +\nu_{t} \tag{1}$$
where,
- \(\nu_{eff}\) = Effective kinematic viscosity of the fluid.
- \(\nu_{t}\) = Turbulent kinematic viscosity or eddy (kinematic) viscosity.
- \(\nu\) = Kinematic viscosity without turbulent effects.
Hence, it wouldn’t be inaccurate to say that the difference between different turbulence models is the difference in calculating turbulent viscosity.
Terminology
In Computational Fluid Dynamics, turbulence models where eddies of all scales are completely modeled, for e.g. RANS (Reynolds Averaged Navier Stokes) models like \(k-\epsilon\) and \(k-\omega\ SST\), use the term eddy viscosity. For turbulence models that use sub-grid scaling to resolve the larger eddies but model the smaller ones, for e.g. LES models like Smagorinsky and Spalart Allmaras, use the term sub-grid scale viscosity.
Hence, for sub-grid scale models equation (1) becomes
$$ \nu_{eff} = \nu +\nu_{sgs} \tag{2}$$
Where,
\(\nu_{sgs}\) = Sub-grid scale kinematic viscosity.
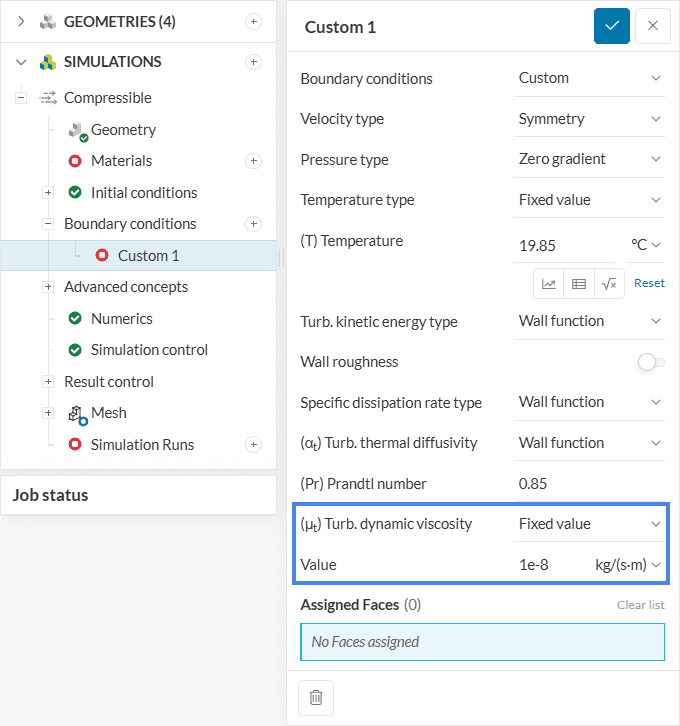
Defining in the Workbench
SimScale allows its users to define dynamic turbulent viscosity \((\mu_{t}\)) or \((\mu_{sgs}\)) in units of \([\frac{kg}{ms}]\) as an initial condition and also as part of custom boundary condition.
Since,
$$\nu = \frac{\mu}{ \rho}\tag{3}$$
the value for \(\nu_{t}\) or \(\nu_{sgs}\) is automatically calculated.
References
- Pope, Stephen (2000). Turbulent Flows.
- P. Jarvis, B. Jefferson, J. Gregory and S. Parsons, “A review of floc strength and breakage”, Water Research, vol. 39, no. 14, pp. 3121-3137, 2005. Available: 10.1016/j.watres.2005.05.022.
Last updated: January 12th, 2025
Did this article solve your issue?
How can we do better?
We appreciate and value your feedback.


