Documentation
Local Coordinate Systems (LCS) allow you to define custom reference frames for your simulation setup. Instead of specifying boundary condition values — such as forces, displacements, or material properties — relative to the global coordinate system, you can create local coordinate systems and apply values relative to them. This is especially useful for models with cylindrical symmetry, angled features, or any geometry where the global axes do not align naturally with the directions of interest.
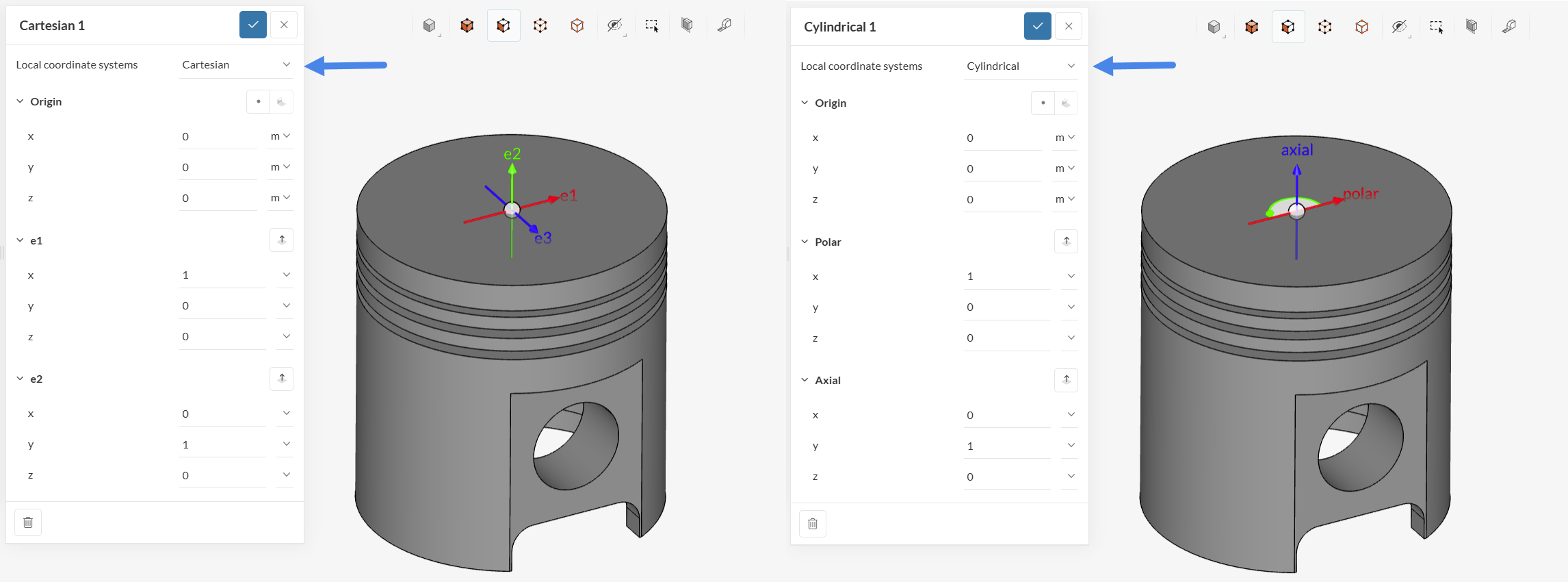
SimScale supports two types of local coordinate systems:
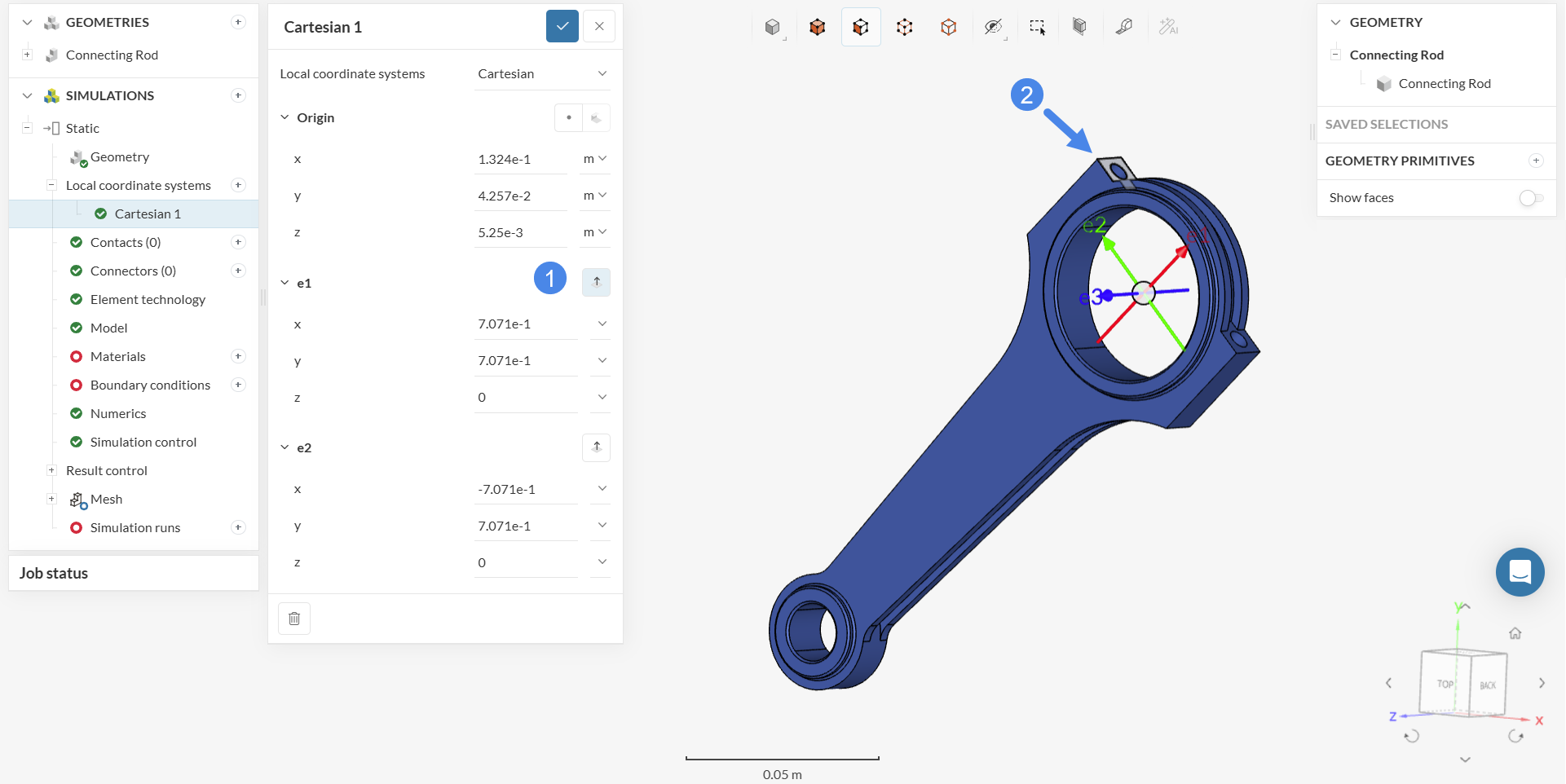
If the active analysis type supports local coordinate systems, a Local coordinate systems node appears in the simulation tree. To create a new coordinate system:
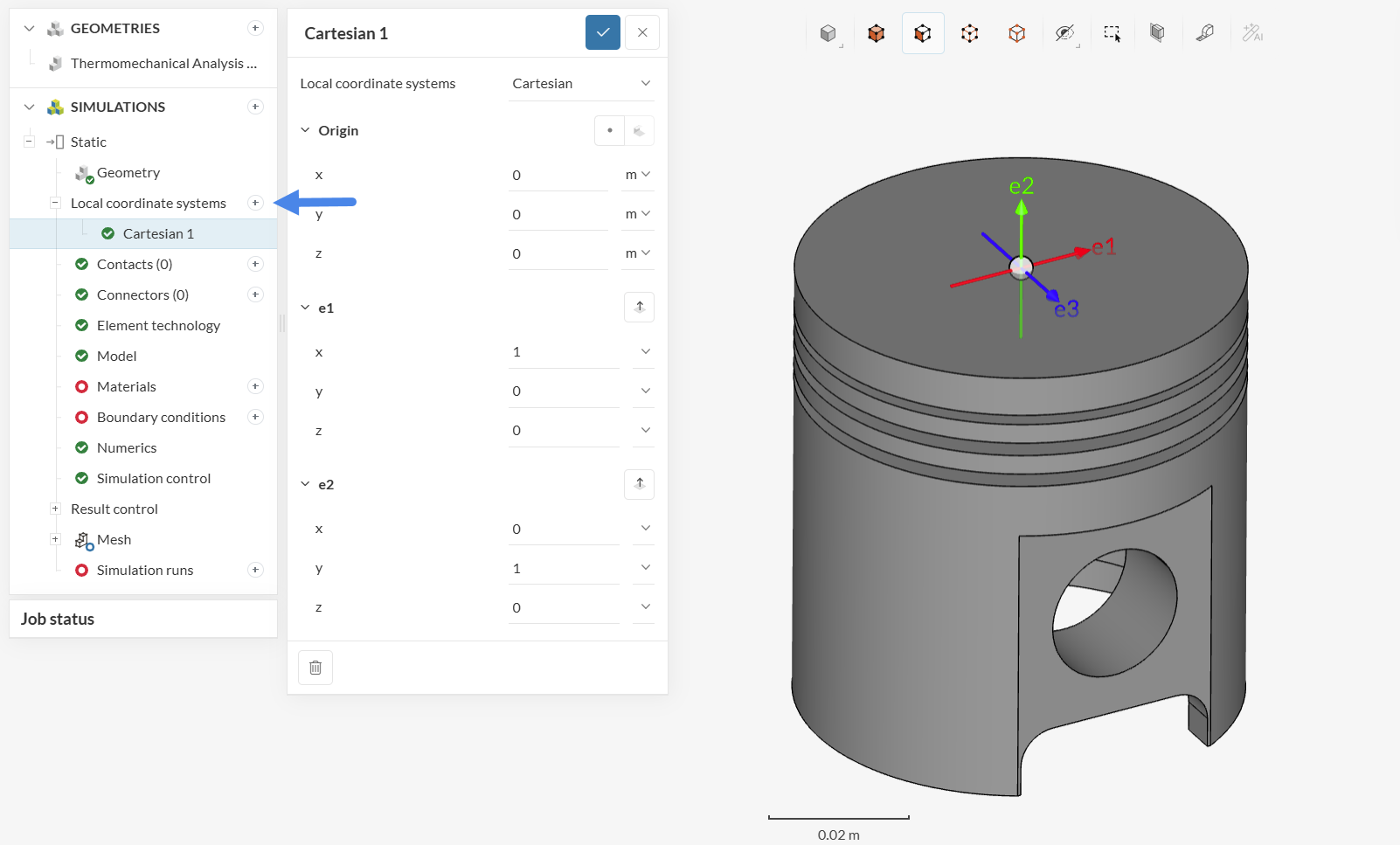
Each local coordinate system has a user-defined Name (defaulting to “Coordinate System N+1”) and a Type: either Cartesian (default) or Cylindrical.
| Property | Description | Default |
|---|---|---|
| Origin | The origin point of the coordinate system | (0, 0, 0) |
| e1 | Vector defining the first axis | (1, 0, 0) |
| e2 | Vector defining the second axis | (0, 1, 0) |
The third axis (e3) is computed automatically as the cross product of e1 and e2 and does not need to be specified.
| Property | Description | Default |
|---|---|---|
| Origin | The origin point of the coordinate system | (0, 0, 0) |
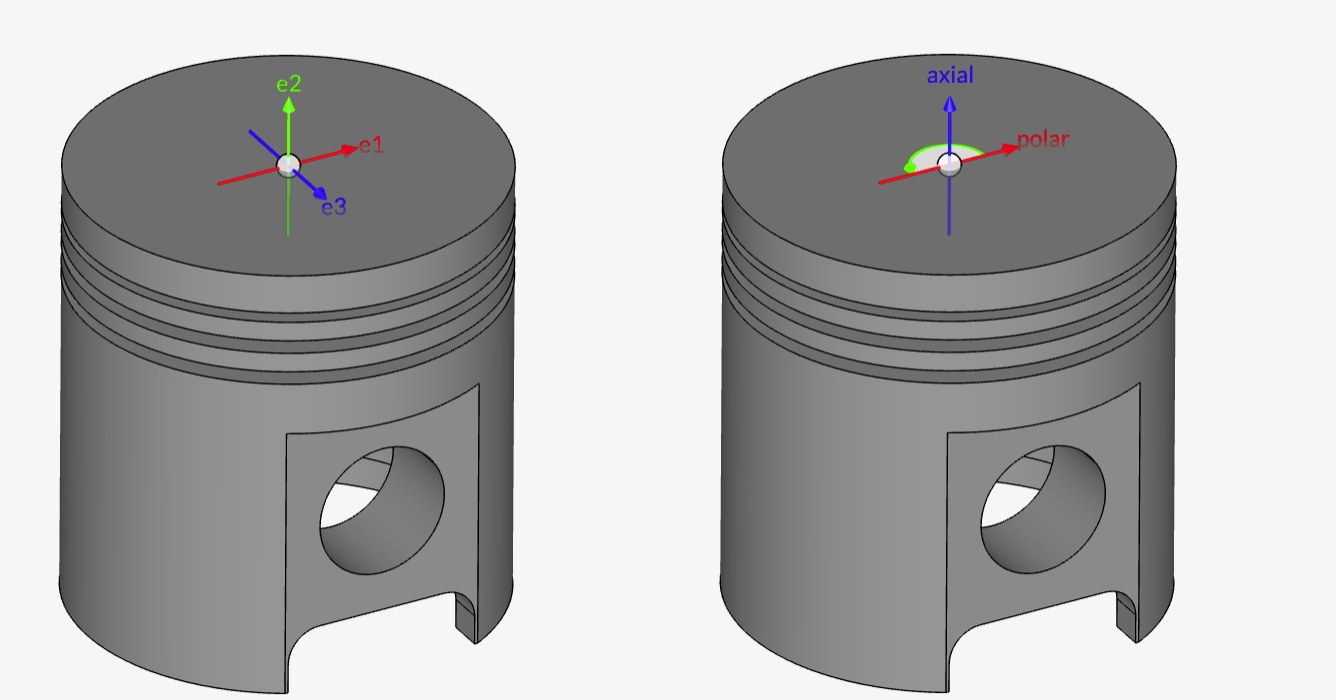
| e1 | The polar axis — defines the zero azimuth direction | (1, 0, 0) |
| e3 | The longitudinal axis — the axis of the cylinder | (0, 0, 1) |
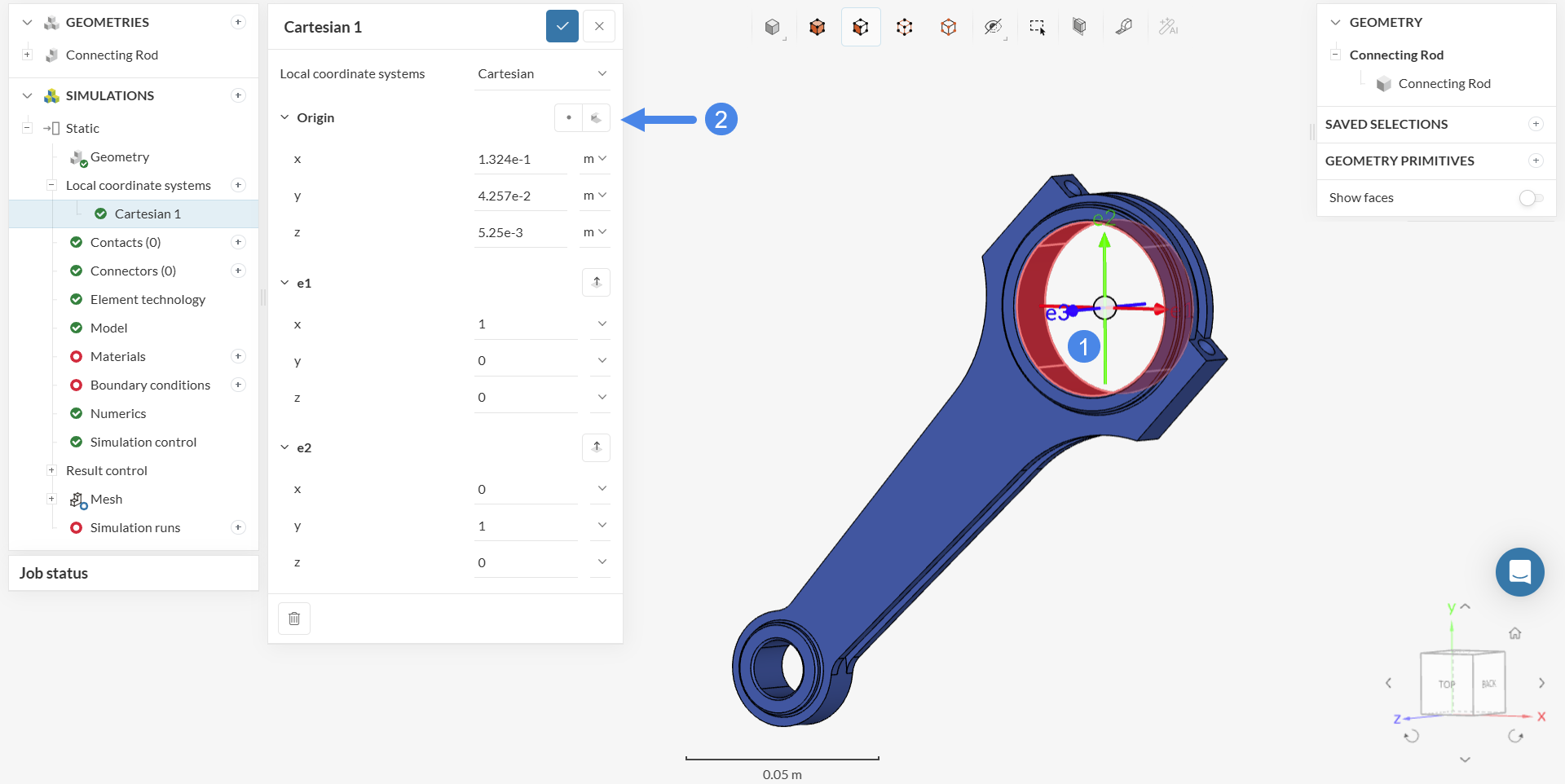
All values can be entered manually. The viewer also provides two interactive tools to speed up the setup:
Axis vectors do not need to be unit vectors — any magnitude is accepted. SimScale applies the following rules when the coordinate system is saved:
| Condition | Result |
|---|---|
| Vectors are perpendicular | Valid — normalized and used as defined |
| Vectors are not perpendicular but not co-linear | Valid — automatically orthogonalized to produce a right-handed frame |
| Vectors are co-linear | Validation error: “Vectors defining the coordinate system must not be co-linear.” The coordinate system cannot be used until corrected |
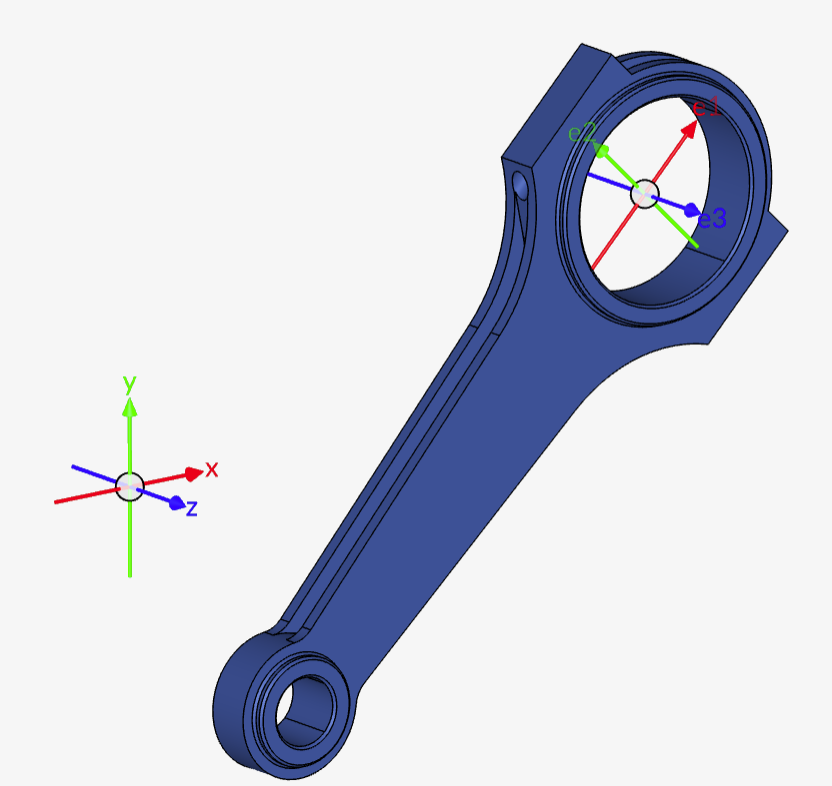
Local coordinate systems are displayed in the 3D viewer using colored arrows:
Arrow lengths are scaled automatically based on the size of the model. If the coordinate system definition is invalid (co-linear vectors), no arrows are displayed.
The global coordinate system is always shown in the viewer. A local coordinate system is displayed when it is selected in the tree or when a boundary condition using it is open. You can toggle the visibility of all coordinate systems using the Show/Hide option in the viewer toolbar.
After creating a custom reference frame, you can assign it to specific physics definitions to simplify your setup. Local coordinate systems can be applied across three main areas of your simulation: boundary conditions, material properties, and advanced tabular inputs.
Boundary conditions that support local coordinate systems include a Coordinate system type field with two options:
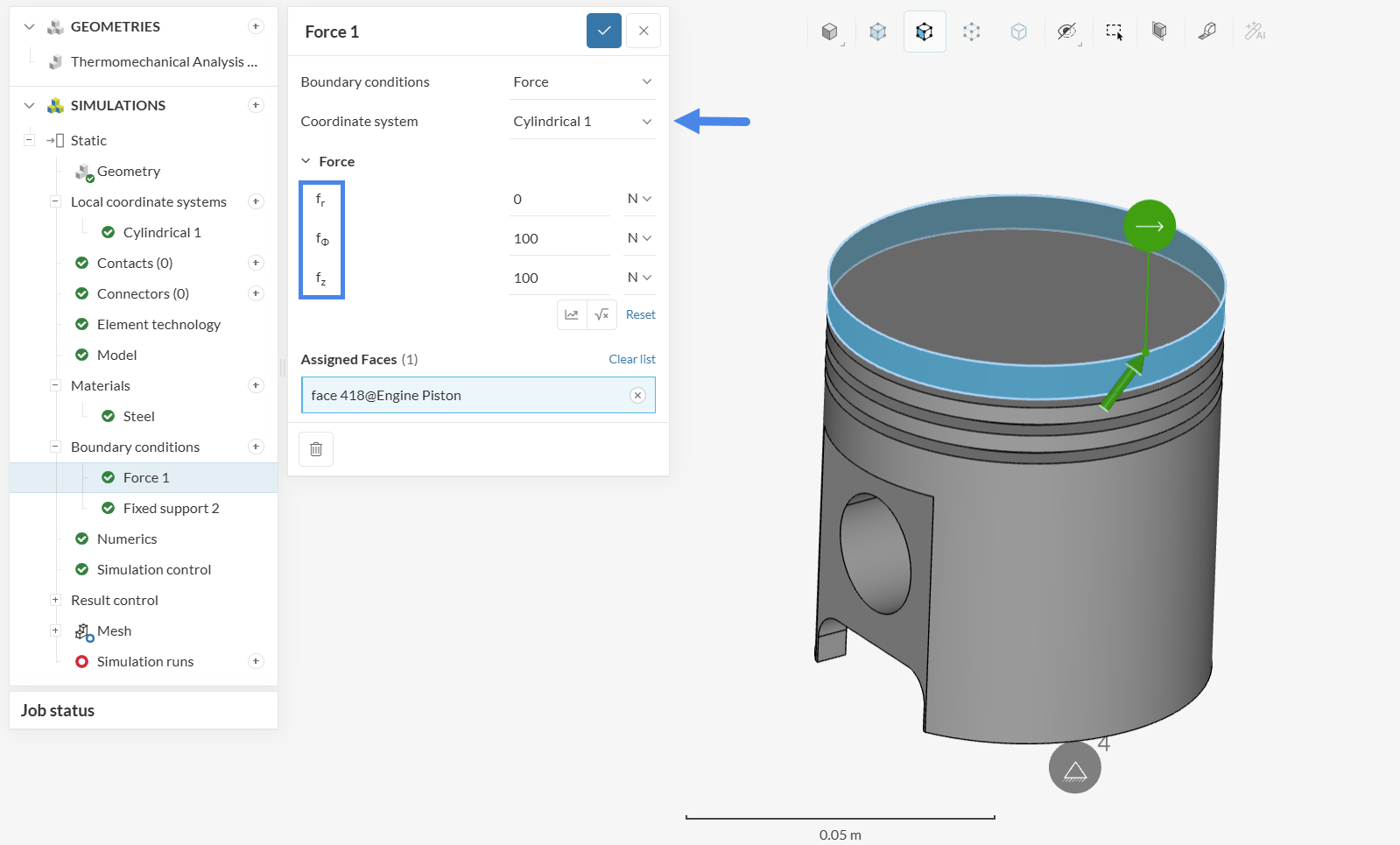
As shown in Figure 7 above, when a local coordinate system is assigned, the component labels in the boundary condition update to reflect the selected frame. The table below details these label changes:
| Value type | Cartesian labels | Cylindrical labels |
|---|---|---|
| Vector (e.g. force, displacement) | Fx, Fy, Fz | F_radial, F_tangential, F_axial |
| Position (e.g. point) | x, y, z | r, φ, z |
Note
One coordinate system applies to all values within a single boundary condition. For example, in a Remote Displacement boundary condition, the displacement, rotation, and external point all reference the same coordinate system.
Orthotropic material properties can be defined relative to a local coordinate system. When a cylindrical LCS is assigned, the material property labels update to reflect radial, tangential, and axial directions (for example, Young’s Modulus in each direction).
When defining boundary conditions using tabular or expression input with a cylindrical coordinate system, the independent variables change from Cartesian (X, Y, Z, T) to cylindrical (R, φ, Z, T), and the dependent variables use radial, tangential, and axial components.
Important
When using cylindrical coordinates in tables or expressions, the angular variable φ must be specified in radians, not degrees.
Select a coordinate system in the simulation tree to edit its values. When editing, a warning is shown:
This coordinate system might be in use in your simulation setup. Editing it will affect your setup. Please be sure before you save or discard your changes.
Use the save and discard buttons in the top right of the panel to confirm or cancel changes.
To duplicate or delete a coordinate system, click the menu icon (⋮) on the coordinate system entry in the tree and select the desired action.
Important
When a local coordinate system is deleted, all boundary conditions and settings that reference it are automatically updated to use the Global coordinate system. This action cannot be undone.
| Limitation | Details |
|---|---|
| Per-simulation scope | Local coordinate systems are stored as part of the simulation setup and are not shared across simulations. Copying a simulation copies its local coordinate systems independently. |
| No CAD import | Local coordinate systems cannot be imported from CAD metadata such as mate connectors. |
| Not available in result controls or post-processing | Local coordinate systems cannot be applied to result controls or used to transform post-processing output in this release. |
| Not available in meshing | Local coordinate systems cannot be used in meshing settings. |
Last updated: May 25th, 2026
We appreciate and value your feedback.
Sign up for SimScale
and start simulating now