Powerful, browser-based drone simulation to perfect your design, reduce physical prototyping costs, and accelerate your time to market.
Our cloud-native platform empowers you to slash development costs by reducing your reliance on expensive wind tunnels and physical prototypes. You can innovate faster by testing dozens of design variations in a fraction of the time it takes to build one physical model and ultimately maximize performance by making data-driven decisions to enhance lift, minimize drag, and ensure structural integrity.
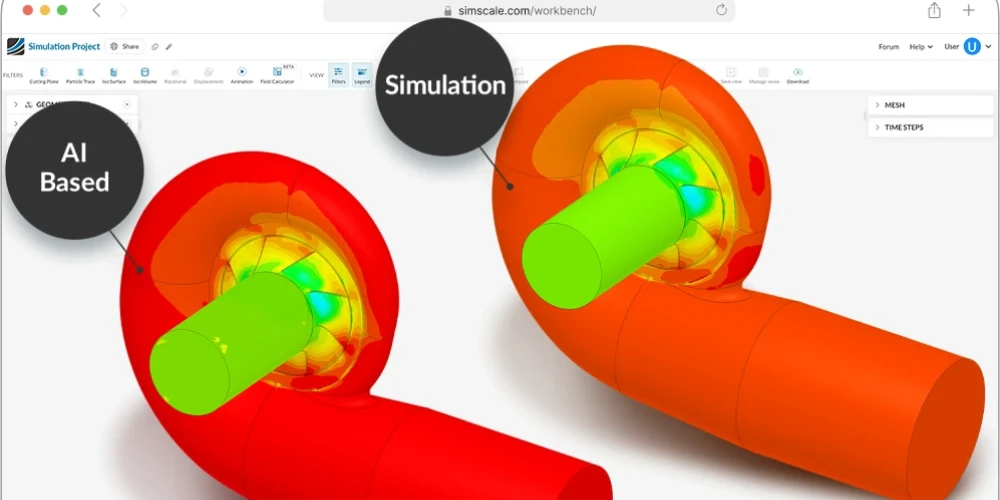
Our Physics AI-driven features work alongside our core physics solvers to predict performance in seconds, not hours. This allows you to rapidly assess the aerodynamic impact of a new body shape or component, receive instant feedback on design changes, and uncover optimal configurations that a traditional process might miss.
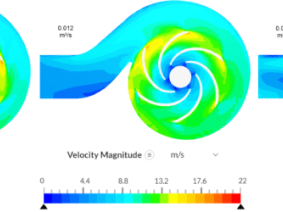
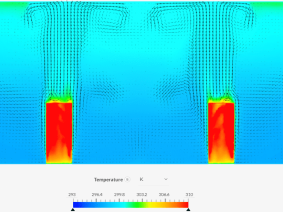
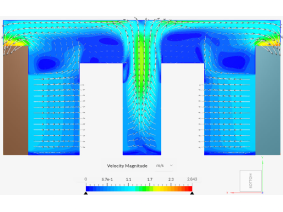
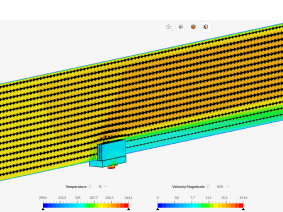
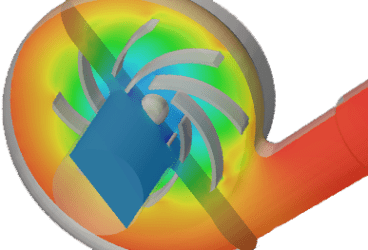
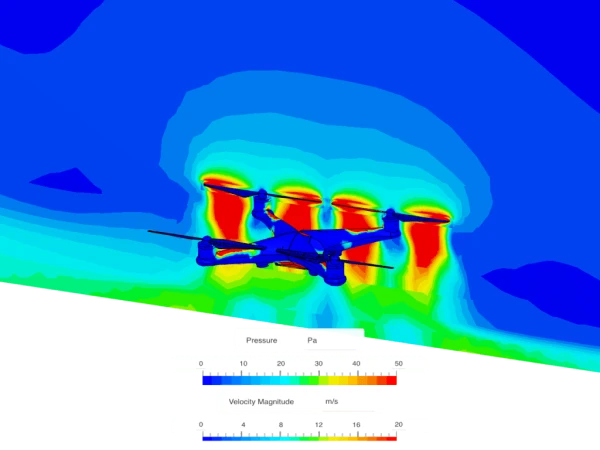
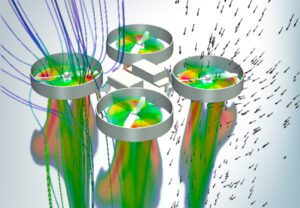
Go beyond basic calculations and gain a deep understanding of your drone aerodynamics. Our powerful drone cfd simulation allows you to visualize complex airflow patterns around the drone body shape and rotors with high accuracy. You can confidently analyze rotor-airframe interactions, investigate the critical ground effect, and simulate a full range of flight conditions, from a stable hover to high-speed forward flight, ensuring peak performance in every scenario.
With our robust capabilities, you can virtually test the airframe, landing gear, and rotor blades to identify and eliminate stress concentration points before they become catastrophic failures. This allows you to evaluate the performance of different materials, and conduct detailed vibration and drop test analysis. Thereby guaranteeing a durable and reliable aircraft.
Optimize every component of your UAV with a full suite of simulation tools, accessible from anywhere with just a web browser.
Customer Success
SimScale allowed us to test a large number of designs very quickly and cost-effectively. The ability to run multiple simulations in parallel is a game-changer.



Check out all the success stories of our customers in the drone industry
See All StoriesCheck out the latest drone simulations performed in SimScale and validated against experimental and/or analytical results.
Your hub for everything about drones and the world of simulation and analysis in the cloud.
Take control of your design process. Use powerful drone simulation to unlock peak performance and reliability. Talk to one of our specialists today to see how SimScale can be integrated into your workflow.
Sign up for SimScale
and start simulating now