Unlock broad, early, and instant drone simulation. From aerodynamic CFD and structural FEA to thermal management and propeller optimization. All within an AI-native cloud platform, accessible from any browser.
Accelerate your drone design workflow with SimScale’s AI-native cloud platform. Leverage CFD to optimize aerodynamics, FEA to validate structural integrity, and conjugate heat transfer to manage battery thermals. Test multirotor, fixed-wing, and eVTOL configurations under real-world conditions. Explore thousands of design decisions in seconds, not days, with no HPC headaches, no VPN, just a browser.
Check Simulation Features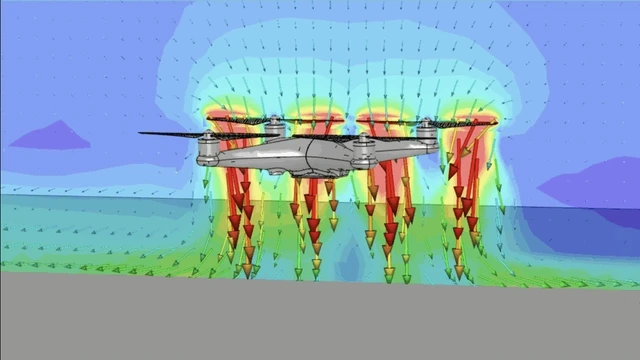
SimScale is powered by two AI systems: Engineering AI to automate manual setup through agentic workflows and AI copilots, and Physics AI to eliminate solve time with instant physics-based predictions. Explore thousands of design variants, from propeller blade pitch to airframe geometry, and identify winning concepts before committing to high-fidelity analysis. Explore whole design spaces in minutes and make smarter design decisions with confidence.
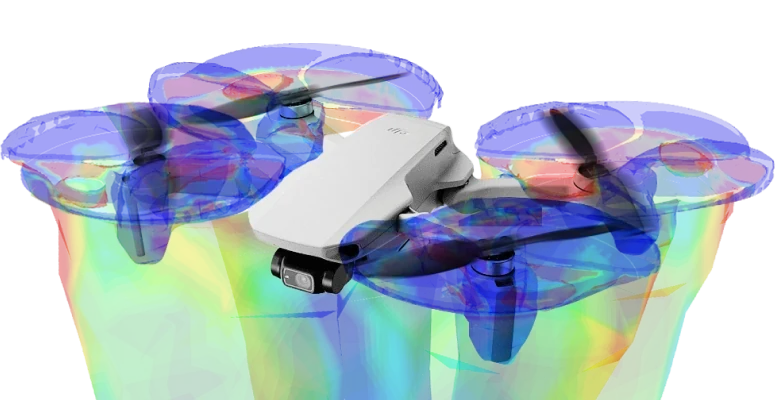
Check AI FeaturesCapture every flow detail defining your drone’s performance. SimScale’s cloud-native platform adapts to your pace, scaling elastically so you can sweep flight conditions in parallel to build aerodynamic databases. Go beyond simplified analysis. Simulate complex airflow patterns around the drone body and rotors with high accuracy, from hover and ground effect to high-speed forward flight. Confidently analyze rotor-airframe interactions and ensure peak aerodynamic performance in every scenario.


Effective drone control systems depend on accurate aerodynamic data across the full flight envelope — through every transition, attitude, and operating condition the drone will encounter. SimScale lets you run structured parameter sweeps across angle of attack, sideslip, rotor RPM, and flight speed simultaneously, generating the comprehensive aerodynamic databases that feed directly into flight dynamics models and control system development. Compress weeks of testing into hours, scaled elastically across the cloud. Feed aerodynamic needs into control system architecture before decisions are locked in.
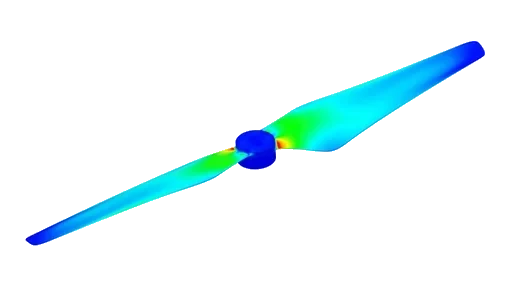
Push your drone design to the limit, then ensure it holds. Assess vibration, stress concentrations, and fatigue on airframes, landing gear, and rotor blades with confidence. Evaluate the performance of composite and lightweight materials under dynamic flight loads, and conduct drop test and impact analysis. Simulation results directly inform material selection decisions — helping you optimise the strength-to-weight ratio of your airframe before committing to a prototype. Build confidence in your design’s structural integrity and support your path to certification, without cutting a single part.
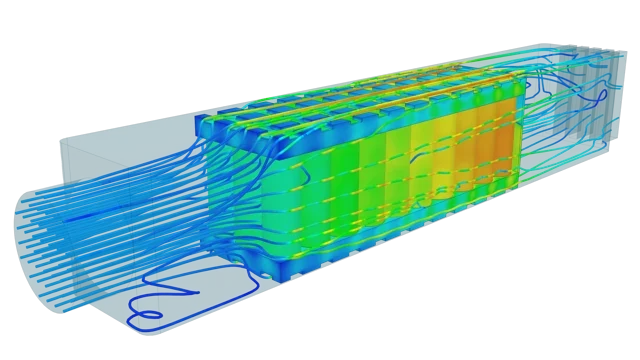
Take the guesswork out of battery and motor thermal management. Analyze heat dissipation from Li-ion battery packs, motor windings, and ESCs under sustained flight conditions. Use conjugate heat transfer (CHT) simulation to engineer cooling strategies that prevent thermal runaway, extend battery life, and maintain motor efficiency, ensuring your drone can sustain longer flight times without overheating.
Real-world drones don’t respect physics boundaries, and neither should your simulation. Break down the silos by coupling solvers to reveal the complete picture. Map aerodynamic pressure loads from CFD directly onto structural FEA models to validate blade and airframe strength under actual flight conditions. Bridge the gap between aerodynamics and durability, and run parametric sweeps across all domains to find the perfect balance of weight, strength, and aerodynamic efficiency for your drone design.
By switching to SimScale, VTOL Technologies explored hundreds of design alternatives quickly and cost-effectively. The ability to run multiple simulations in parallel proved to be a game-changer, delivering a 20% lift improvement through rapid design space exploration.

Check out the latest drone related simulations performed in SimScale and validated against experimental and/or analytical results.
Check out the latest content around drone simulation from our blog.
Subscription Plans Adapted to Your Needs
Free for testing & learning
For structural & thermal simulation work
For higher fidelity simulation work
For broad simulation roll-outs
Drone simulation uses physics-based engineering analysis — CFD, FEA, and thermal — to predict how a UAV will perform before a physical prototype is built. Engineers use it to evaluate lift, drag, propeller thrust, motor heat dissipation, battery cooling, frame stress, and vibration response. Simulating early shortens design cycles, cuts physical prototyping cost, and de-risks flight tests by catching issues like propeller-induced vibration, electronics hot-spots, or structural failures before they happen in the air.
SimScale supports the full multiphysics stack required for UAV development: CFD for external aerodynamics and propeller wake, MRF and rotating zone modeling for rotor analysis, conjugate heat transfer for battery and electronics cooling, and FEA for frame stress, modal vibration, and landing impact. Everything runs in the browser on cloud HPC, so a single engineer can run aerodynamic, thermal, and structural studies in parallel without licensing separate solvers or buying workstation hardware.
When meshing, turbulence model, and boundary conditions are set correctly, CFD predictions of lift, drag, and propeller thrust typically fall within a few percent of wind-tunnel and flight-test data. Accuracy depends on resolving the rotor wake, the boundary layer near blade surfaces, and ground or fuselage interactions. SimScale supports steady MRF for quick rotor estimates and transient sliding mesh / AMI for high-fidelity hover, forward flight, and ground-effect studies.
Yes. Conjugate heat transfer (CHT) couples solid-state heat generation in cells, ESCs, and flight controllers with airflow through the airframe — including forced cooling from propeller downwash. Engineers use this to size cooling channels, validate thermal interface materials, and predict pack temperature during sustained hover or high-discharge missions. Both steady and transient CHT run on the cloud, with no GPU or local hardware required.
Three approaches are available depending on the question being asked. Actuator disk or BEM-based body force models give quick thrust and torque estimates. Multiple Reference Frame (MRF) captures steady rotor performance with reasonable runtime. For transient effects — blade-vortex interaction, hover instability, propeller-fuselage coupling — sliding mesh / AMI resolves full rotor motion. All three are accessible from the same browser-based interface.
SimScale’s FEA covers linear and nonlinear static stress, modal frequency, harmonic vibration, and dynamic impact. Common UAV use cases include landing-gear impact, arm deflection under thrust load, payload mounting stress, and natural-frequency separation from rotor passing frequency to avoid resonance. Models can be coupled with CFD pressure loads for fluid-structure interaction on rotor blades and airframe surfaces.
Runtime depends on physics, fidelity, and parallel core count. A steady CFD hover analysis on a quadcopter typically completes in 30 minutes to a few hours, transient rotor studies in several hours to a day, and a thermal CHT or modal FEA in 15 minutes to an hour. Because SimScale scales jobs across cloud HPC, multiple design variants can run in parallel — compressing project turnaround from days into hours.
Sign up for SimScale
and start simulating now