
ANYbotics AG was founded in 2016 as a spin-off from ETH Zurich in Switzerland to commercialize the technology behind the ANYmal series of quadrupedal robots, although the ANYbotics team has been building quadrupedal robots since 2009. The robot designs have matured and become increasingly reliable each year and progressed from laboratory testing to fully functioning products operating at industrial sites in real-world conditions.
ANYbotics is a leader in developing battery-powered legged robots for industrial inspections in complex, hazardous, and potentially explosive environments such as off-shore oil platforms and industrial plants. ANYbotics builds its solutions based on autonomous-legged robots that assist human-led intervention in most environments. The robots are hi-tech products with state-of-the-art sensors, electronic equipment, and parts that require precise engineering within strict safety and operating limits. ANYbotics has been leveraging the power of engineering simulation in the cloud by using SimScale to optimize its designs’ structural, thermal, and airflow characteristics. The team at ANYbotics had been using traditional simulation software for many years and has recently switched to using SimScale. The main drivers of switching to SimScale include its ease of use, accessibility through a web browser, absence of hardware requirements, and intuitive but powerful parametric analysis tools. Because of the simple SaaS pricing and deployment model in SimScale, it was also straightforward to deploy to a larger team when scaling up simulation to form a core strength at ANYbotics.
Dr. Alessandro Scafato, Development Engineer at ANYbotics, is a simulation specialist and has a Ph.D. from Loughborough University, UK. He leads the simulation and analysis capabilities at ANYbotics and acts as an internal consultant to the broader engineering and product development teams. The core analysis team provides detailed simulation and insight and is surrounded by a larger group of engineers that use simulation ad-hoc at the earlier concept stages. The simulation team’s primary focus is on the structural and thermal performance of the robots, using finite element analysis (FEA), heat transfer analysis, and computational fluid dynamics (CFD) by providing continuous design feedback during the iterative development cycle. Simulation is used at the earliest opportunity, from the concept stage to product testing and compliance purposes. Using their preferred CAD tool, Solidworks, the engineering team has developed a streamlined workflow from CAD to simulation, benefitting from the parametric simulation abilities in SimScale that allow engineers to test multiple CAD variants of a proposed model in parallel.

The ANYmal is an autonomous four-legged robot with sensors that patrols complex and harsh environments as a data collection and analysis vehicle. Unlike manual inspections or stationary sensors, ANYmal’s design enables automated navigation throughout complex and large-scale industrial facilities by using built-in sensors to adapt to its surroundings. It is waterproof and weatherproof and designed to operate in harsh and dangerous conditions to provide complete facility coverage in a scalable, safe, and cost-efficient manner. The design needs intensive validation and testing for such a complex device to operate successfully and safely in harsh environments. Structurally, the robot must be tough, durable, and able to withstand falls, impacts, and high-pressure discharges. The robot has electronic sensors, CPUs, circuits, and lithium-ion batteries that require safeguarding and thermal management to prevent overheating. The compact design of all the components must be cooled using forced convection cooling with heat sinks, heat dissipators, and thermal management technology. The application of engineering simulation is essential to correctly design a fit-for-purpose product that needs continuous structural, thermal, and fluid flow analysis.
Explosive atmospheres compliance is of paramount importance in the structural integrity of the ANYmal X robot. Because the robot operates in potentially hazardous, corrosive, or flammable conditions, it must undergo strict compliance testing to ensure that it does not potentially ignite explosive atmospheres and to ensure it remains intact after being exposed to hazards or some kind of impact. The robot contains a pressurized vessel with nitrogen gas, which protects the main body from fire events when exposed to sparks and high temperatures. However, the vessel must be strong enough to retain pressure when exposed to high-speed impacts (e.g. from scattering debris). International Electrotechnical Commission (IEC) 60079 sets the standards for devices used in explosive environments, amongst which are structural tests that apply an external impact force using high-velocity steel balls to evaluate deformation and the spread of projectiles and gas from an explosion. This series (parts) covers a wide array of important considerations for potentially explosive atmospheres and deals with general equipment requirements, environmental conditions, and various methods for equipment protection and material characteristics. The standards also describe testing procedures and specify the environmental conditions under which tests must be performed and include multiple parts such as:
The ANYmal robot is tested and validated using the above standards. The explosive standards test whether the robot would survive an impact and the ballistics of metal and other parts that get scattered. The positively pressurized nitrogen vessel, if pierced, would release gas from the robot, exposing the internal electronics. Therefore the vessel must have its structural integrity intact, post-impact. It is hit with two free-falling 20 mm diameter steel balls (vertically). Depending on which component is under test, the balls fall from different heights to replicate various impact potential energies. Every part of the exposed robot (not protected by foam or reinforced) must be subjected to the test and survive – including sensors, controls, and the main body.
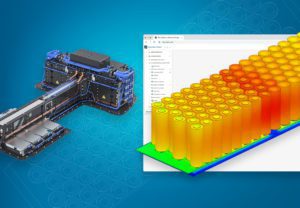
ANYbotics realized that some parts of a previous generation of the ANYmal robot were failing the impact tests leading to component damage. This was before simulation had been embedded in the engineering teams from the concept stage onwards. The physical tests would only give binary results, pass or fail, without providing any further insight. ANYbotics decided to digitize the test regimen by creating a virtual set-up in SimScale to represent the conditions specified in the standards. The images below show a simulation of an impact test used to optimize a robot’s protector design to evaluate the maximum deformation at impact and residual deformation after the effect. They can now perform as many ‘tests’ (simulation runs) as they wish, using the virtually unlimited computing power of the cloud. It also saves them costly parts and physical prototypes, which they had to manufacture using third parties for each test.
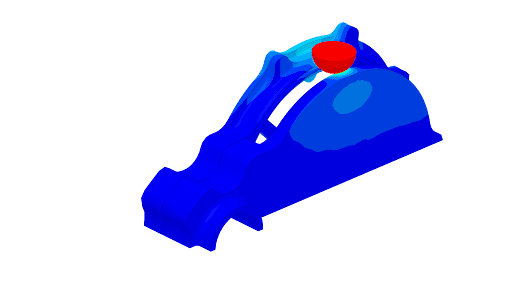

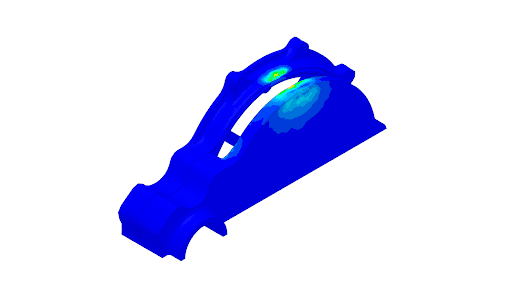
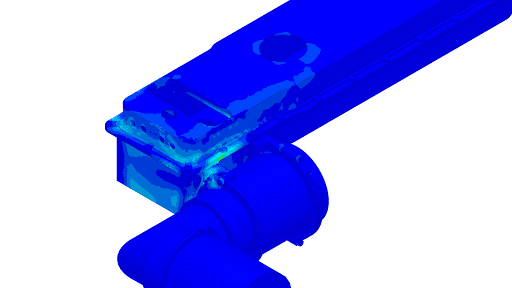
The images above show a part of the robot where the LIDAR (360°laser sensor) is placed. The impact tests showed that the steel balls were forming cracks on the protective structure, compromising vital components. Design intuition would tell an engineer to reinforce the element by using either more thickness or a more robust material, which would add mass to the robot. Using the parallel simulation tools in SimScale, ANYbotics chose to vary the geometry and simulate multiple CAD variants, leading to the addition of a chamfer instead. This created a much larger surface area to absorb the impact (compared to a sharper edge) resulting in a lower force per unit area below the threshold needed for structural damage. SimScale gives ANYbotics access to a wide range of outputs. The vital structural outcomes for optimizing the ANYmal include Cauchy stresses, von Mises stress, and deformation/displacement. All are simple to output quantitatively and visually using the automated post-processor in SimScale. Other analyses relevant to the ANYmal include simulating repeated stair climbing, rollover, and the stress on the leg to trunk (body) joints secured with bolts. A load is applied to the legs, and the resulting fatigue is estimated using Cauchy stresses and deformation (See image below).
By improving the accuracy of their FEA-aided design process, ANYbotics was able to reduce the many expensive prototype iterations required to ensure a robust product, down to only a few prototyped designs. Most of which are aimed at optimizing weight to strength ratio of structural components, as well as minimizing their manufacturing costs.
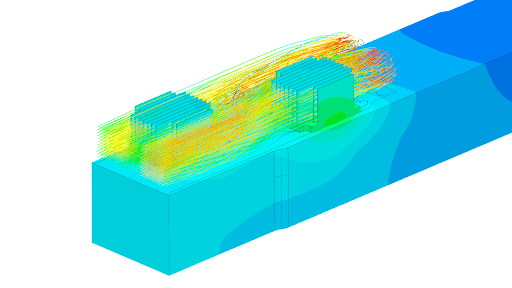
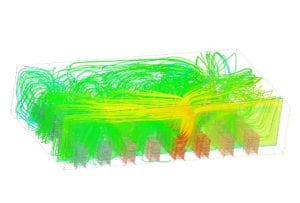
The ANYmal robot contains heat-generating electronic components that require continuous thermal management to operate safely and avoid component damage. The safe temperature range is designed not to exceed 50℃ above ambient in order for the robot to operate at its specified operational ambient temperature. The image below shows a contra-flow arrangement where two fans (80 watts each) force airflow through a couple of aluminum heat sinks. Under them sit the main CPUs and electronic circuitry. A further heat dissipator device is under the heat sinks to distribute heat. The engineering team at ANYbotics has simulated numerous cooling strategies, including natural convection, heat pipes, alternative heat sink, flow layouts, and various materials. In SimScale, they can model heat transfer quickly and accurately, including thin layer materials such as heat paste and high conductivity thermal pads. This resulted in a simple, yet highly optimized cooling strategy, with cooling fans that operate at a very energy-efficient maximum of 5 watts each, avoiding the use of large and heavy heatsink designs and prolonging battery life.
Autonomous robotics require demanding engineering simulation that can account for a broad range of physical phenomena. ANYmal robots work in both natural and industrial sites, whilst being exposed to challenging atmospheres including slippery, dusty, or even explosive environments. These must be accounted for when designing any of its hardware components. With SimScale we found our ideal balance between ease of use, variety of capabilities, and the ability to handle complex physics. However, we came to appreciate SimScale's customer service as the most welcome benefit of all: their expert involvement allowed even less experienced engineers to run reliable simulation studies.

Dr. Alessandro Scafato
Senior Development Engineer at ANYbotics
ANYbotics has developed considerable simulation expertise in its engineering team and uses advanced physics and engineering to develop the next generation of autonomous robots. The engineering team already performs hundreds of simulations for each product and component design, made possible by the cloud computing and scalability of the SimScale platform.
They plan to extend the use of multiple analysis types to include vibration and harmonic testing of critical components, and leverage CFD further when designing cooling systems for their more prominent and powerful robots. Combining multiple analysis types across the entire design cycle for numerous product categories also requires automation within the design to simulation workflow. ANYbotics plans to leverage the powerful SimScale application programming interface (API) to integrate its CAD, design of experiment (DoE) tools, and simulation into an efficient workflow, suitable for a growing engineering company at the forefront of robotics. This would allow the engineering team to use the power of simulation beyond just design and digital twinning to quantify risks under various operating conditions. This allows for the better training of algorithms that can predict failure in real-world situations.

Sign up for SimScale
and start simulating now


