Here was that last suggestion Richard @rszoeke had in the other topic and I have not been able to implement his suggestion yet (not sure I understand his suggested fix):
It would really help if I could use this much less core hour intensive setup to continue with my project.
I will have a look at your project later on Dale, hopefully I can find the culprit in the setup Maybe @ggiraldo has some additional tips and hints for you.
In the meantime I tried a 3rd sim run but still error…
Here was my logic for Run 3:
First, I am trying to find a sim setup that can be a validation of the theoretical final size that the plastic coin will get pressed into (simply to the diameter that my CAD program says is the final diameter of a cylinder of equal volume as the un-pressed coin but with a thickness of the final distance between the dies two contact surfaces after the full ram movement at iteration time 1.0s).
To achieve #1 in the sim setup, I decided to initially try to apply Ram Movement to the actual face that makes physical contact with the plastic coin, my brain said that this would likely be the best way to ensure that there would be no compression (or uneven compression) of the upper die to take into account. In a similar thought process I decided to support this whole press setup on the physical contact face of the lower die.
My run 3, simply changed the Ram movement face and the lower die support face to the upper face of the ram die and lower face of the lower die. (which would seem to add some die compression possibilities and make it harder to use as a validation setup)
I took a look at your project, this is what I found:
Why are the three pieces not spanning the same arc? The middle body is wider. This could be a problem.
The elastic support parameter might be too low. Also, it is not constraining in the Z direction, which I think is the important one because X and Y are already constrained by the cyclic symmetry.
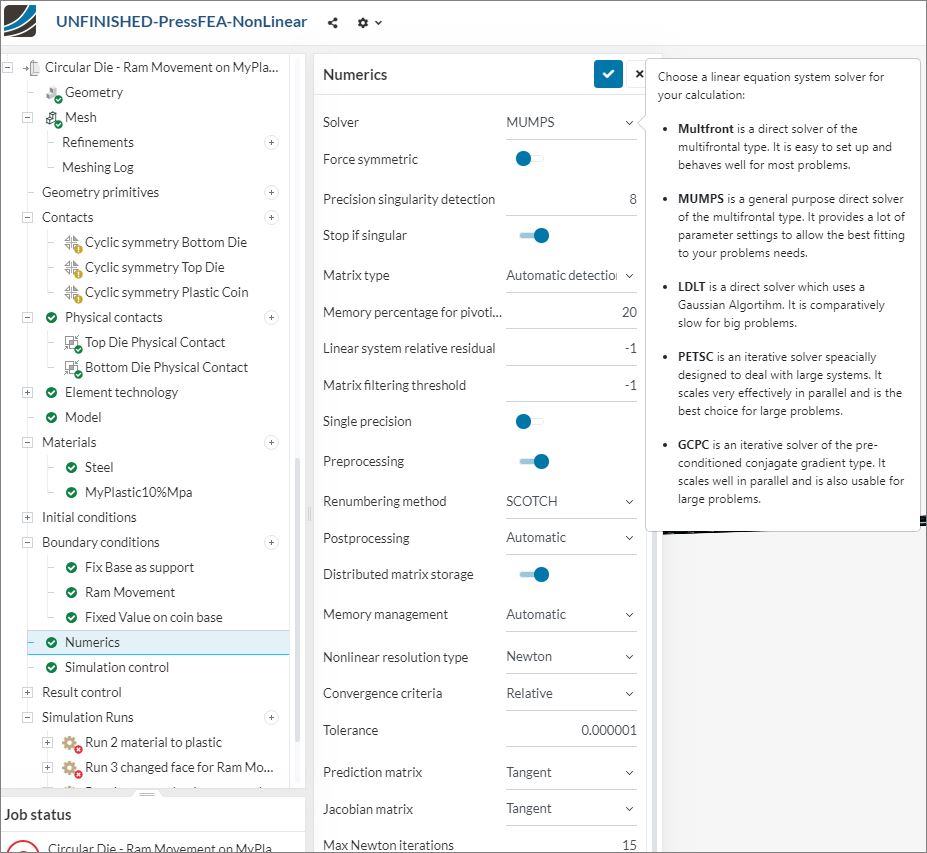
Again with the elastic support, if it doesn’t converge, maybe try the dynamic solver.
Please tell me if this helps or further help is needed.
The problem is that at the very first solution step, contacts are not activated and then the body is not constrained, this is why we use the elastic constraint. It is numerical stuff and pointless to get into that details now.
Also wanted to point out, what are your plans for the material model? I saw you have a bi-linear plastic, but I think a hyperelastic model should be better suited.
Edit. Don’t worry about core hours, failed simulations do not count.
Aha, now I sorta understand Richards suggestion in first post, my brain was already thinking it was constrained by ‘Physical contact’, silly me
I was planning on correcting the plastic model and stress/strain curve once I got something working, I will definitely investigate hyperelastic model, much thanks on that
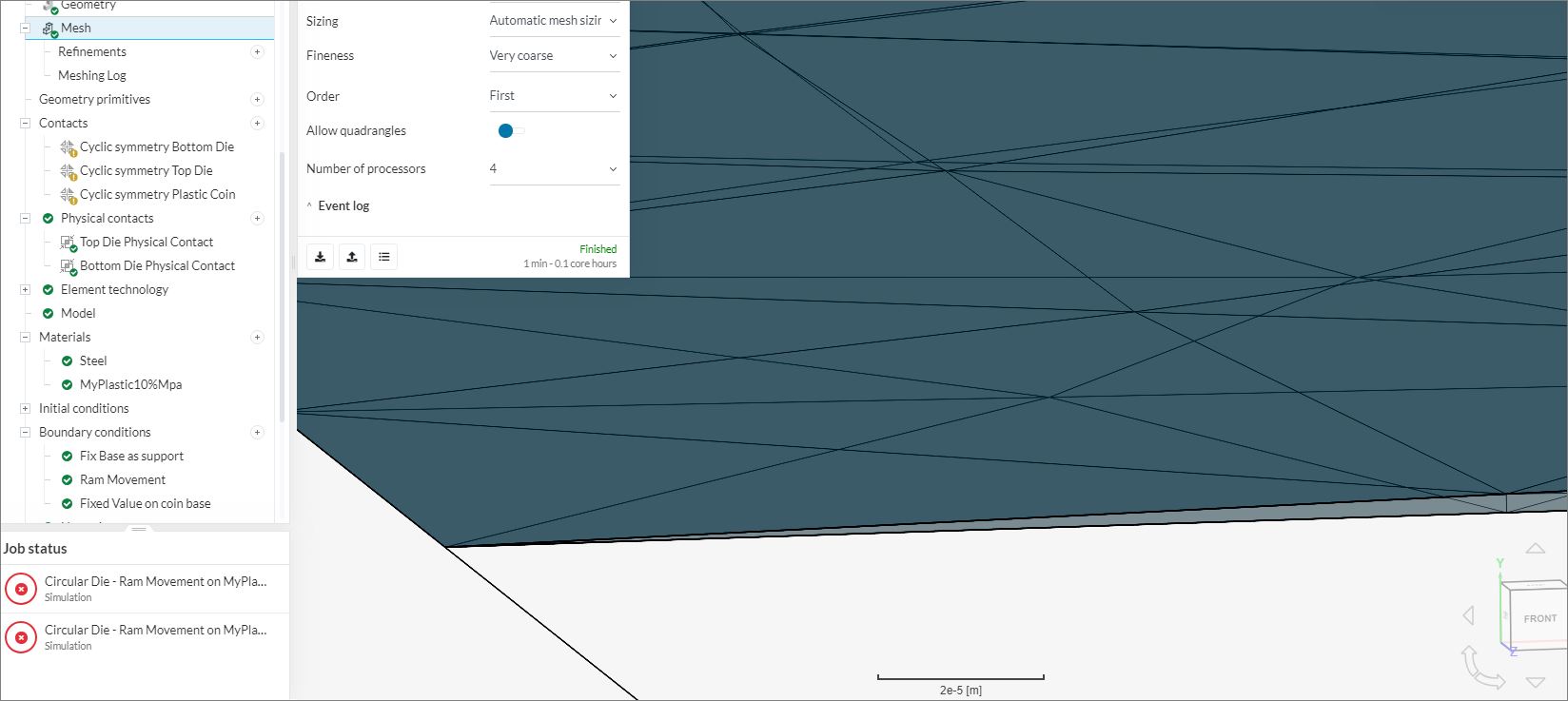
Your 1 Degree sector is causing really badly shaped elements in the Coin near the center. Maybe if you did 5 degrees the aspect ratio will not be so bad.
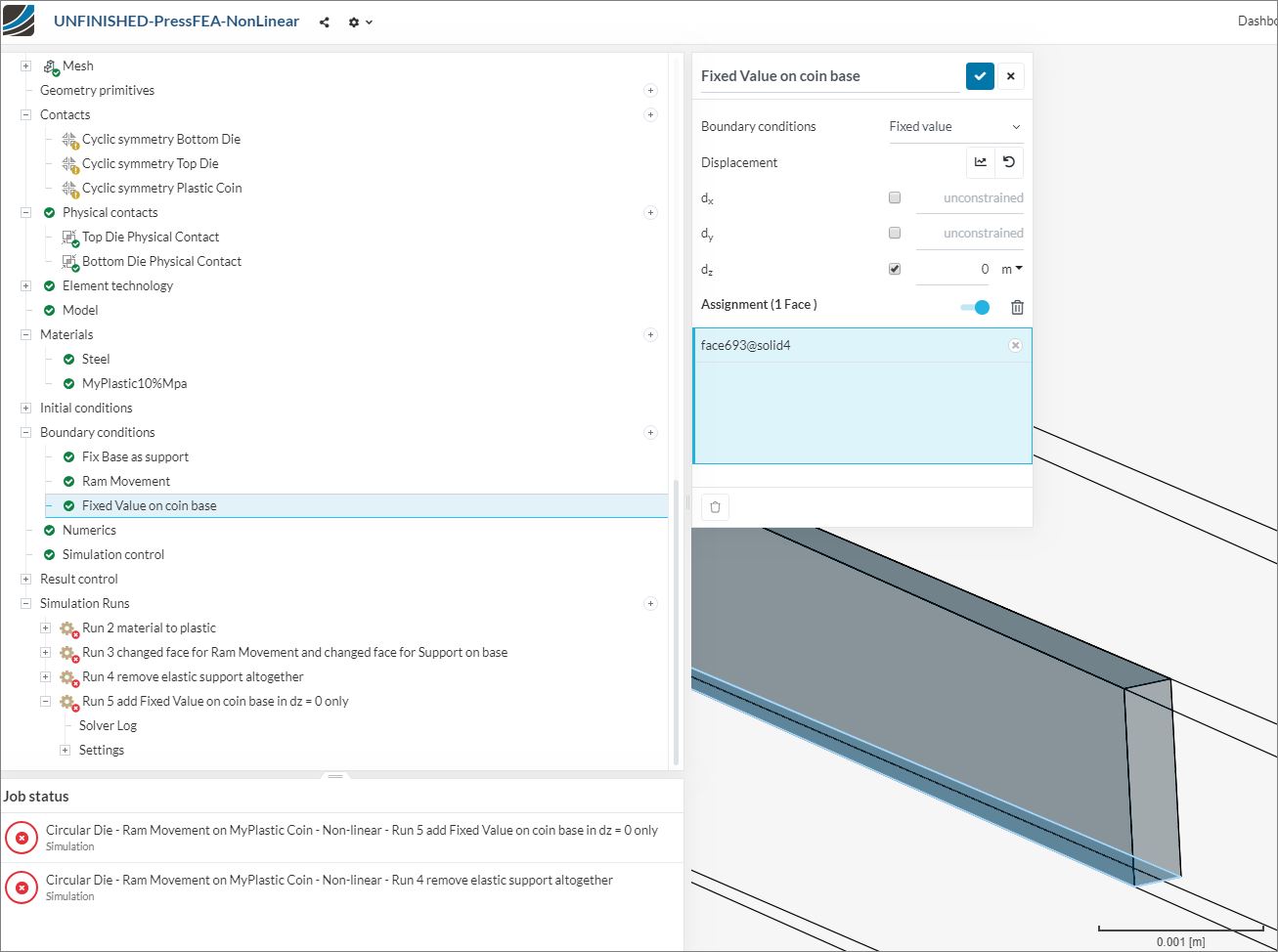
You Fixed the bottom of the coin in Z so this totally eliminates the bottom contact . I would remove this and go back to the elastic support.
I don’t think the top of the press is constrained on the initial calculation so I would try a Elastic Support on the top surface in the Z direction.
I will try that but I am just assuming that long thin triangular faces would not be such a problem with FEA, is this face that tapers to the cyclic rotation center line the badly shaped element you see :
So if 1 degree slice gives 50/1, and with this center slice in our ‘area of interest’, where we want 5/1, wouldn’t I try ~10 degree slices
Ah, I am beginning to ‘see’ all this in my brain, watch out for fallout
So, perhaps I would have seen this earlier had I simply placed the 3 solids 1 mm apart from each other in the CAD file…
In all cases, ‘Physical contacts’ do not engage until some movement of objects has occurred or pressure applied, even if the part faces are coincidental to begin with …
Before that contact happens (that is infinitesimally small movement with respect to coincidental faces to begin with), all parts must be fully constrained except in the direction we want them to move …
So, the simulation starts to move the ram (or apply pressure), at some point contact is made with the coin, then those 2 parts move together until the coin hits the lower die where ‘contact’ is made and the coin should start expanding until the limit of ram movement.
Does my brain now ‘see’ this correctly
If so I think my next attempt may work better
Footnote: Is this elastic spring rate for an ideal spring of infinite length and the geometry parts are assumed to have no mass
Do the elastic springs ever impart loads to the face they are attached to that would affect say, how big a diameter the coin gets pressed to
P.S. Stll unanswered:
The Ram movement is dx =0 dy = 0 and dz is a t dependent formula…
So, in Run 6, I have tried adding the elastic support on the top and bottom round faces of the coin at spring rates of x0 y0 and z1000 N/m. This still results in unconstrained error
So, I gave up with the cyclic symmetry. I think I know what is going on and maybe @rszoeke can correct me if I am wrong. As far as I can tell the Cyclic Symmetry boundary condition does not stop the model from rotating about the axis. Normally what I would do is create a local (r, theta, z) coordinate system at the center of rotation and then constrain the side faces to theta=0. Another option to constrain the model would be to apply a boundary condition to a node or point but in WB 2.0 we don’t have this option anymore.
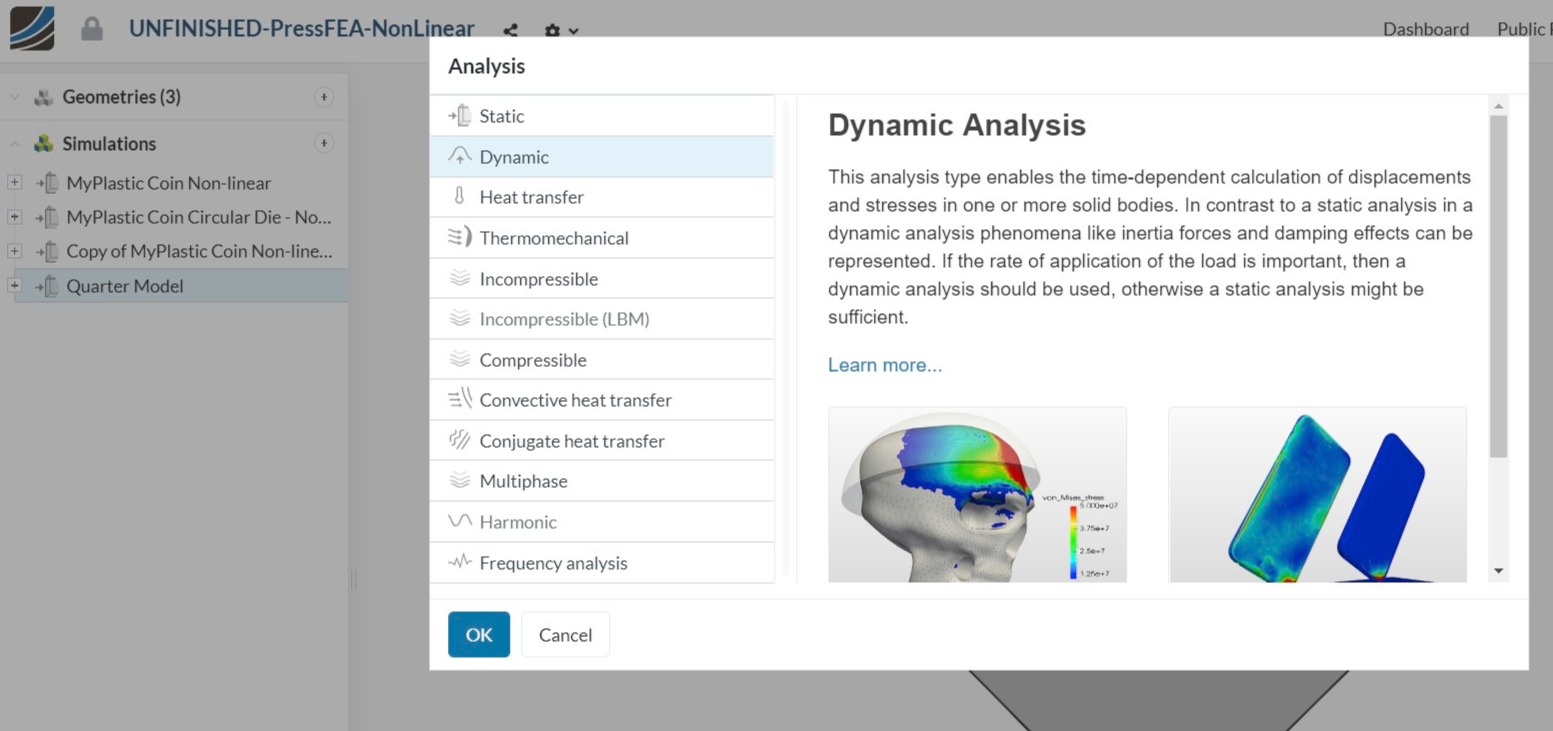
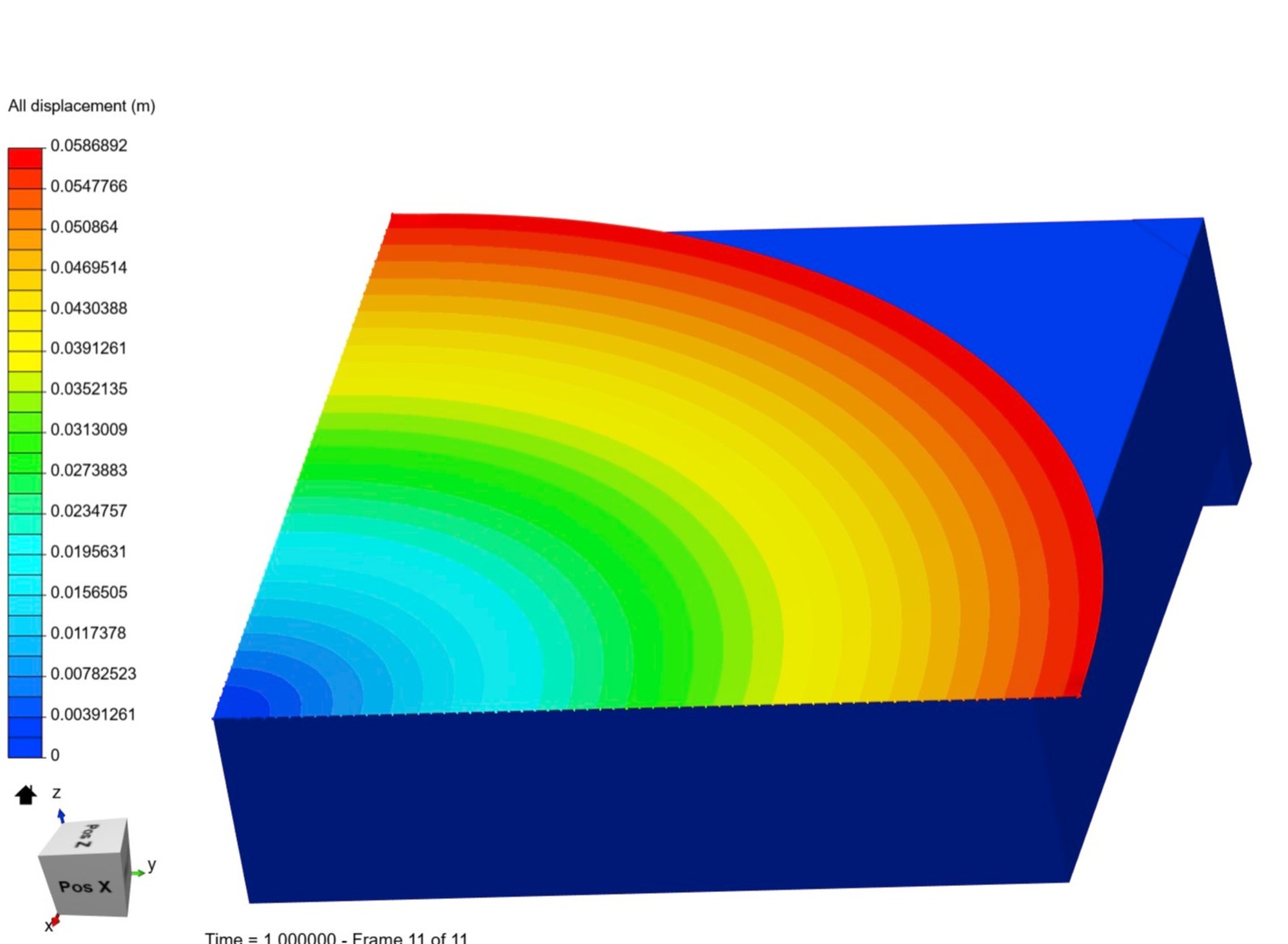
I went back to a quarter model and aligned the side to the global coordinate system and I came up wit the following results.
That is GREAT, lets see if Richard agrees with you on cyclic symmetry.
BUT, perhaps that cyclic error on the last 10 degree sector was related the the RHINO bug.
Did you try a run on your Parasolid 10 degree sector with cyclic, just to make sure our cyclic problem is not RHINO bug related
I the meantime I used your Quarter model and made the plastic ~10 times ‘softer’ so the coin diameter would increase due to less ram force which causes less flexing in the die plates.
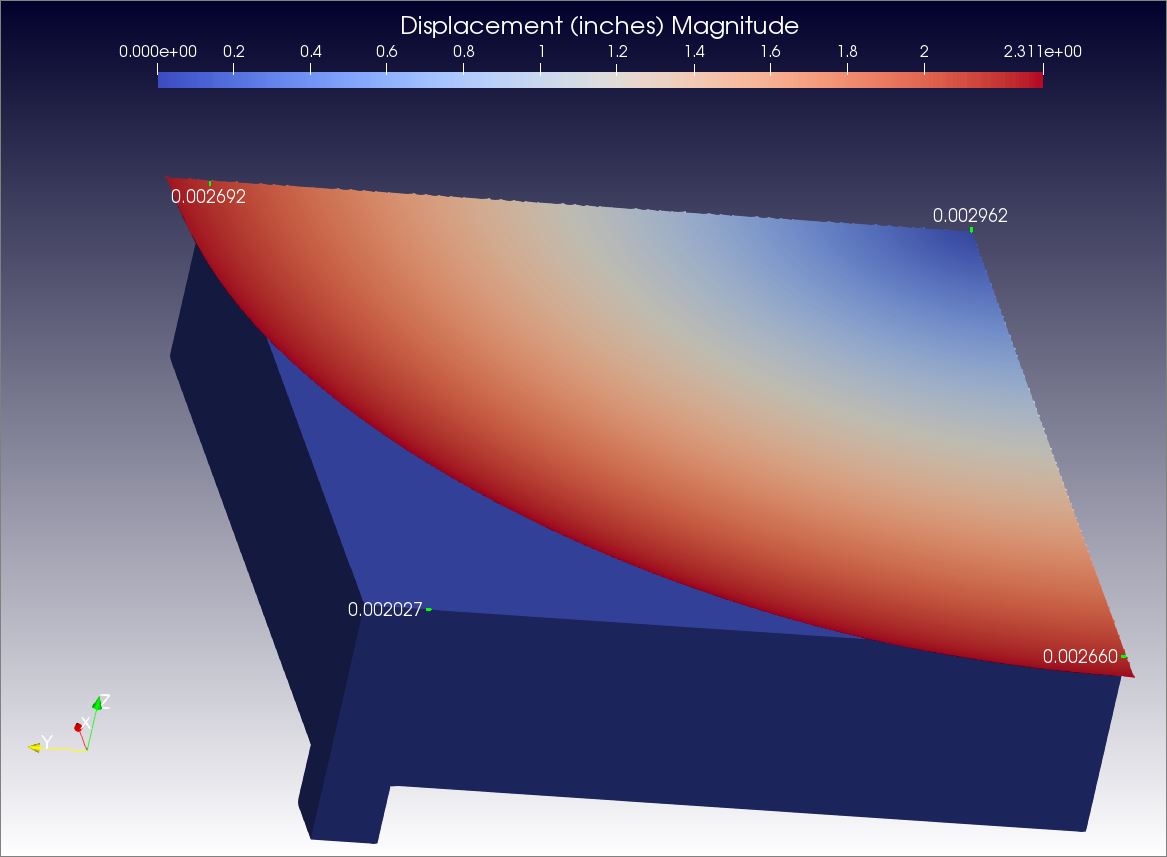
Ideally I want a uniform 0.002" think plastic coin.
Here are the dimensions of your run in inches at various points:
But there is still no answer to this topic, since there is no solution for a cyclic symmetry setup that will finish a simulation run, still need help there please …
 Maybe
Maybe