Hello. I have been messing around with simulating a 3d printer gantry for some time and i can’t seem to get physical contacts to work. When i start the simulation the parts constrained with physical contacts they seem to “penetrate” eachother. i have tried to turn on "Stop if interpenetration, contact smoothing and fictuous clearence with 0 on master and slave. I have pretension on all the bolts and screws.
Would anyone be so kind as to look into my project and see if you can spot anything i did wrong?. I’m very new to simulation so any tips would be great too!. Thanks!
Hi TorxFighter, thanks for reaching out to us here in the forum.
Can you please give me a bigger overview of what you want to simulate?
What I see is that the arm just would move along the gantry? Also, why do you simulate this as non-linear material behavior?
Thanks for the answers? I’m sure we can find a solution to your problem.
Best regards
Sebastian
Ok. This model is just a cut down version of the full thing because i was trying to eliminate me making mistakes in setting up manual contacts.
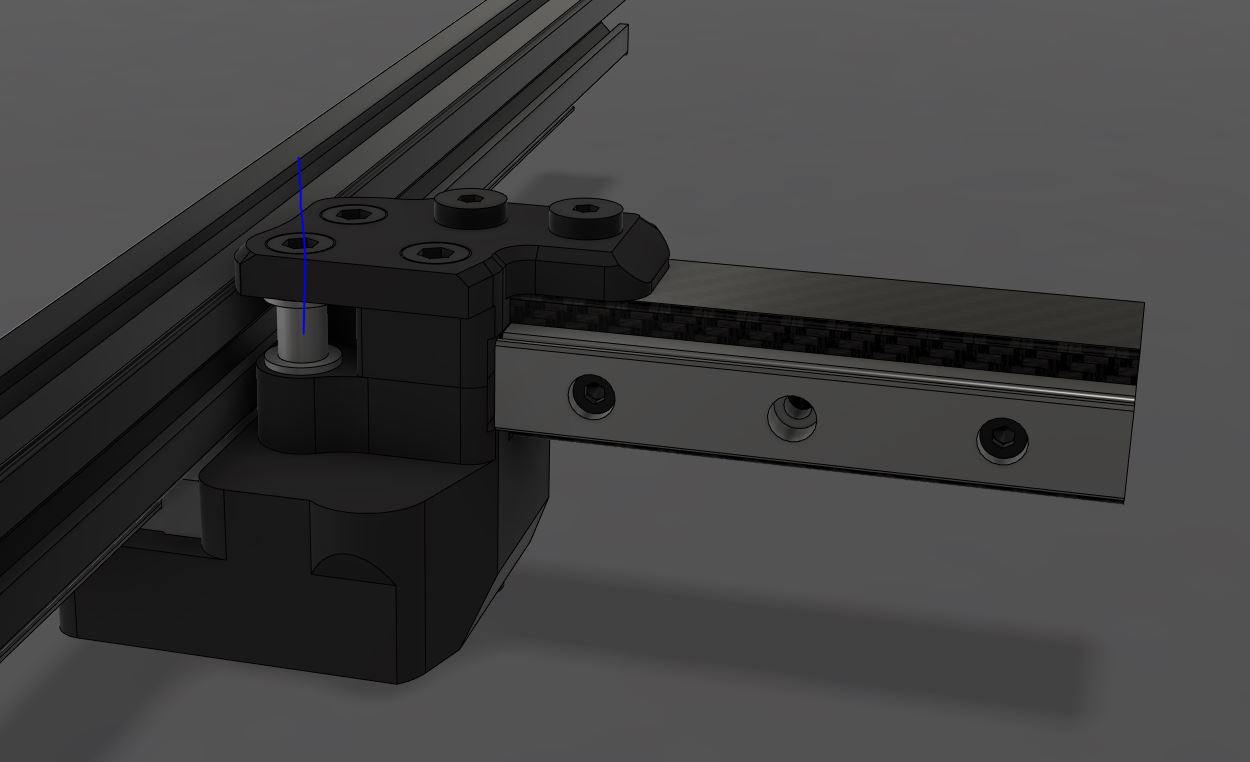
The thing i’m trying to simulate is how this screw affects how tightly/ rigidly mounted the x gantry (the tube that is cut) is. I’m seeing how twisting forces around the simulation x axis and push/press forces along the y axis affect it with and without this screw. The reason for me using non-linear is because of me not wanting to glue the top part to the bottom part and want to see the reaction of the parts when the forces is applied and my uderstanding of this is that i need to use physical contacts for this but i can’t seem to make it work.
I have another project where i imported the full size of what i’m trying to simulate here.
Hi,
first, you may have a look on the definition of the different contact definitions here:
most of the contact for you would be sliding / physical contacts.
With that, you might better define which contact face gets which definition.
Best regards Sebastian
I managed to get a result after changing some contacts around. But when i transfer all the settings over to the bigger model it doesn’t wan’t to run. It seems to be stuck at 0% progress for 30 minutes and after i cancel the run it says “Simulation failed during the bolt preloading step”.
I’m not testing any sliding. I’m testing the mounting methods from the 2 Y extrusions on the sides to the 1 X carbon tube that crosses between. The “adapter” that connects the X axis to the Y linear rail on both sides has 2 pieces and i’m planning on testing 2 cases. one with the screw clamping through an idler (the gray piece) and one without that screw.
The model i can’t get a result out of is /projects/TorxFighter/vorongantry/
The test model i got a result out of is /projects/TorxFighter/x_gantry_simulation_understanding/