I am trying to simulate a friction hinge in the following project – I want to answer the following question: How much torque is required to rotate the pin?
The hinge has a fixed face, inside is a bearing (or bushing), and inside the bearing a pin which we will rotate. The bearing has an interference with the hinge, and while its geometry has a clearance with the pin, once it is press-fit into the hinge, the material compression will also create an interference fit with the pin, with the expected effect that the pin won’t rotate bellow a minimum torque.
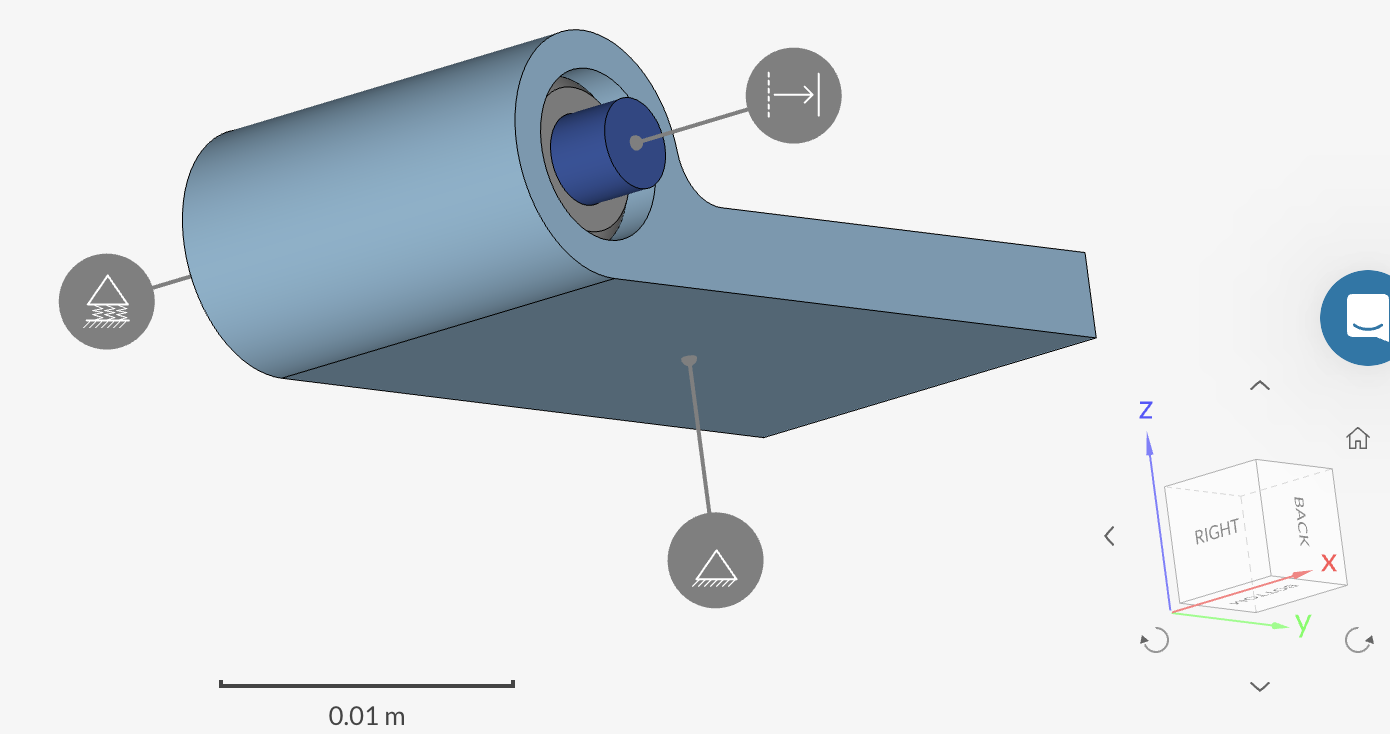
I created a static nonlinear simulation and defined 2 physical contacts: between the bearing and the hinge, and between the bearing and pin. I also added an elastic support on one of the bearing side faces, in order to assuage a simulation warning about the bearing being only constrained by physical contacts.
To answer the problem statement, I set a time-based outside rotating motion on the outside face of the pin. The pin will rotate 15 degrees during the simulation.
Thanks for posting your question, and sorry for the delay.
Could you please specify how this torque is applied? The first thing that I would do is an imprint operation to correctly read the contact faces, and then apply a remote displacement in that region as shown below.
NOTE: Firstly, do a move operation in the part diameter to make pin connected to the bushing. The same is required for the connection bushing-hinge. To know more about CAD Mode operations like Move and Imprint, please take a look at this page.
Again, I do not know how the torque is applied, so maybe it is not the right approach, please tell us more about it.
Is there anything obviously wrong with my method, simulation settings or interpretation of the results?
In a first view it seems that you are trying to see how much torque is required to rotate the pin, but adding a moment control in the bushing faces, which should be wrong. Please do a double check in the Result Control’s tab.
How do I have confidence that the results are accurate/realistic and within what range?
At least two important things are required here, for any CAE simulation, verification and validation. TO know more about it, please take a look at this short article:
How can this simulation be improved, simplified, optimized or refined?
I think following the points that I have mentioned here above you will get success on that.
Thank you @goncalves. I will study V&V – regarding the other points:
Regarding imprint, it seems that it does nothing more than split the faces to allow an exact match of the contact areas, I assume it would be equivalent to do this in my external CAD preparation? In the simulation those are defined exclusively as physical contact, so I am not sure how much effect precisely matching face boundary to contact has?
The pin is moved from outside the hinge, imagine that where it is cut straight, it continues further, and is moved by someone using a wingnut head at the end. (As a side note, because the pin continues further, it seems like Underformable would be a better definition for the face that we are rotating.) Why the suggestion of rotating the outside region vs. the face where the pin would continue and torque would be transmitted in the real material?
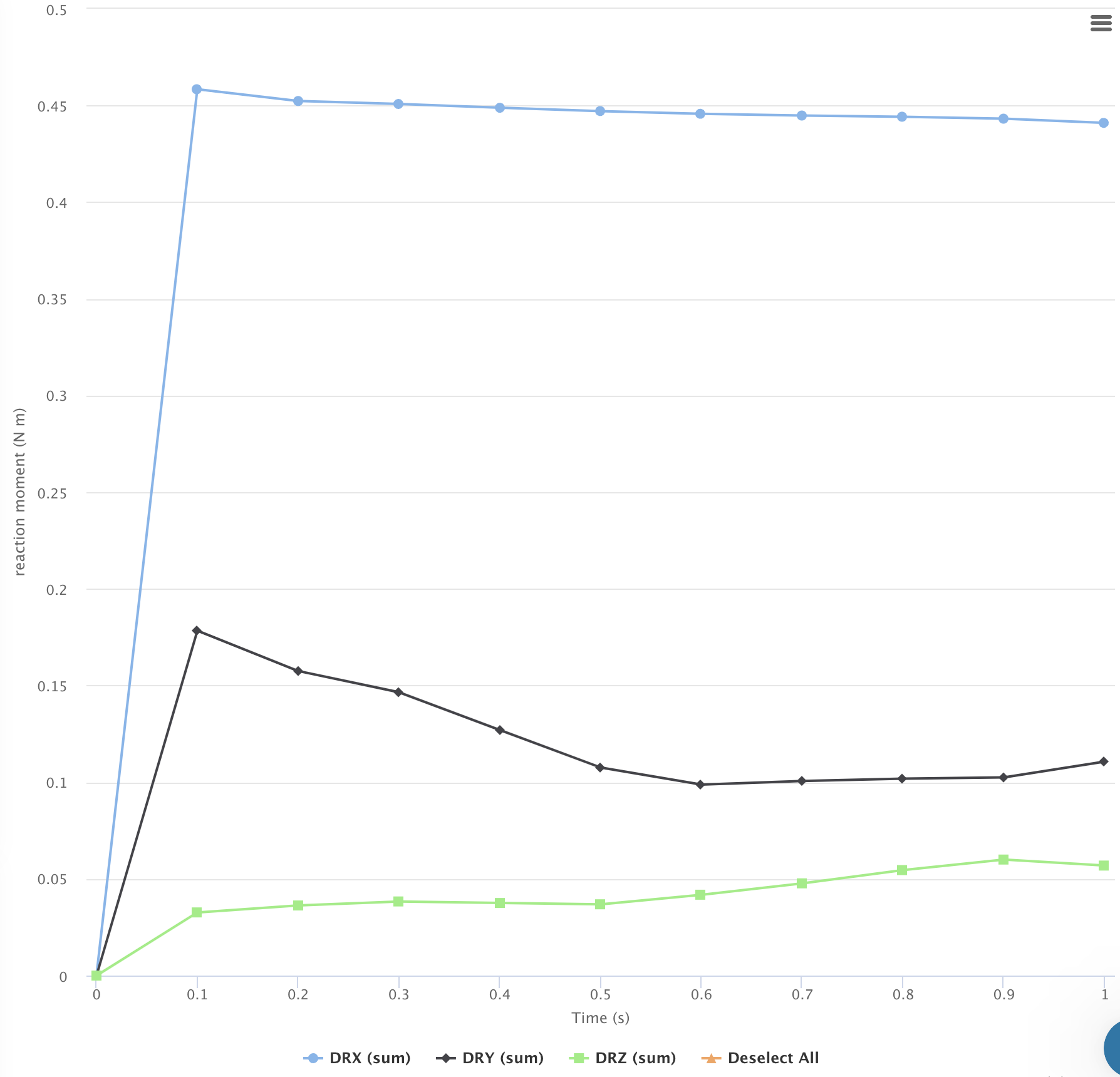
I am struggling with this one. The model being driven by an imposed displacement I assume that the simplest way to measure this would be to measure the moment-reaction on the area of the same face on which I am imposing the rotation. – but I also see examples from other users like press-fit simulations where the forces are measured on the contact areas where the friction is present. I tried both methods and am getting inconsistent or contradictory results.
Regarding imprint, it seems that it does nothing more than split the faces to allow an exact match of the contact areas, I assume it would be equivalent to do this in my external CAD preparation?
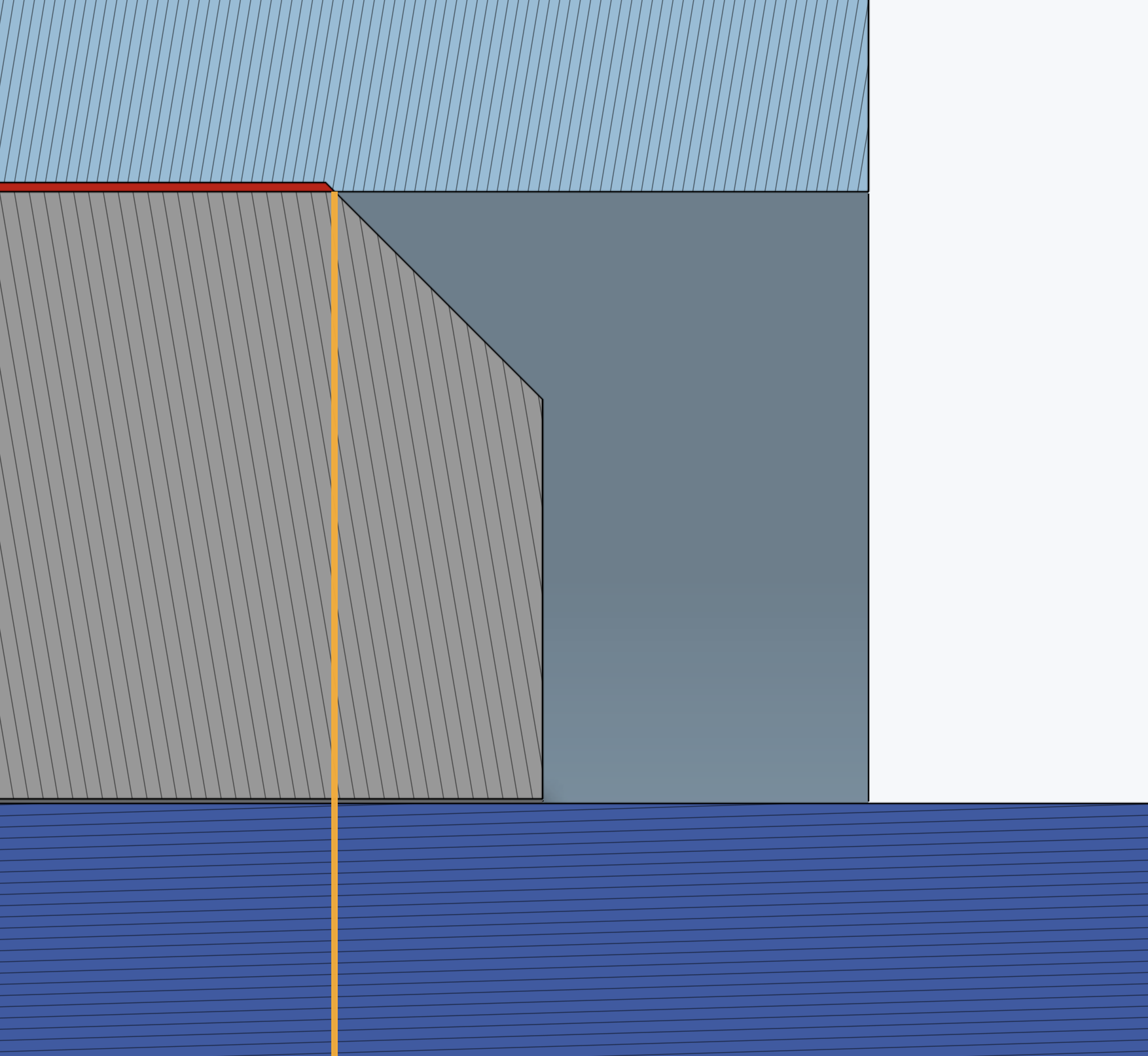
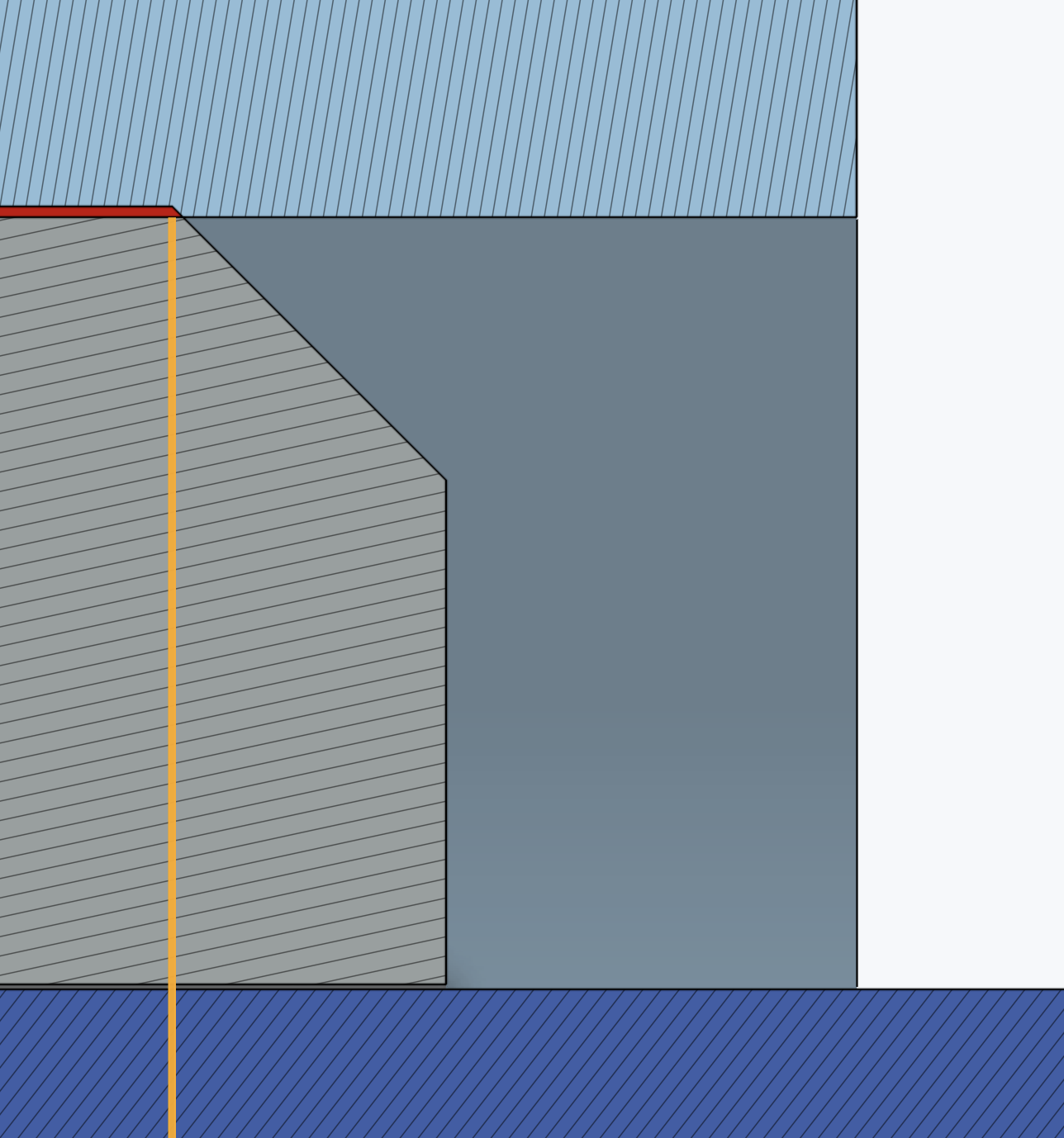
Yes, it allows the exact match of the contact areas. No, it is not equivalent to your CAD preparation, since you just have overlap on bush to hinge interface, as you can see in this before-and-after imprint operation:
In the simulation those are defined exclusively as physical contact , so I am not sure how much effect precisely matching face boundary to contact has?
The precision to matching face boundary to contact is defined by contact penetration between two faces. If you do have large penetrations, you will miss a good amount of real forces in the simulation, so that is why the importance of imprint operation as well, for a good contact definition. As small this contact penetration is in the simulation, close the results are to the reality. To summarize, aiming to get precision in the contact boundary definition, you must do:
Reduce the size of penetration as much as you can, for that you can assure that in the CAD drawing and then applying a good mesh refinement.
Adequately consider friction coefficient to correctly distribute forces between faces.
To know more about it, please take a look at this page.
Why the suggestion of rotating the outside region vs. the face where the pin would continue and torque would be transmitted in the real material?
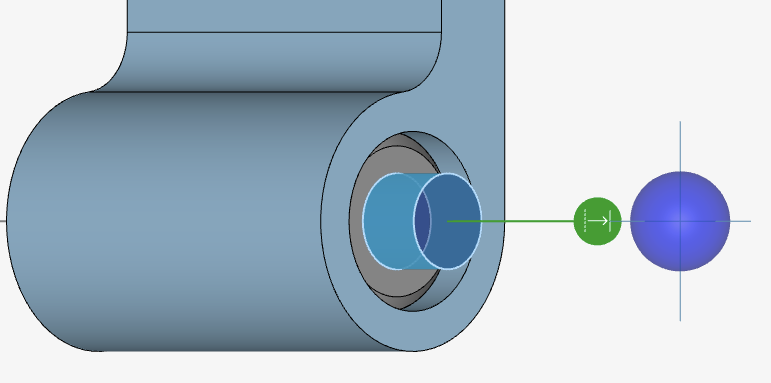
Applying torque in external surfaces is the typical approach if you are aiming to get the correct structural behavior, once torque is a rotational force acting around a geometry (It should be applied in the end face just in very particular cases. Here you have a nut, so it is not the particular case). I see from your explanation that the pin is continuing, so in this case the right approach should be applying this remote displacement in a point in the fictitious end, assigning the external surfaces, as shown below (assuming the fictitious continuity of the pin for 0.02m):
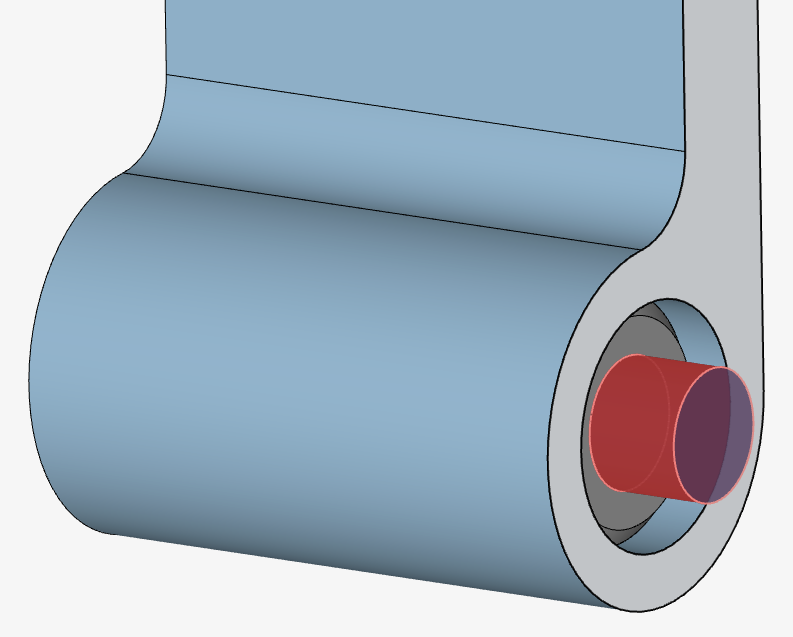
In the previous CAD preparation I did, the face of the hinge is split where the interference with the bearing/bushing begins. Is the only difference with imprint that it splits it where it ends? Or is there something more? Section views below to see what I mean – I just updated the geometry in the simulation to fit the 2nd image as I assume this is what imprint does.
– I am trying to understand what it does exactly to ensure that I can do this operation in CAD preparation instead of having to manually run imprint each time a geometry is imported so that it is repeatable and change logged in CAD. The SimScale documentation of imprint only says that it splits the faces where the contact is.
Do you mean the geometry interference? That is the main point of the simulation so we can’t modify this to fit the simulation. Perhaps instead you mean to increase contact stiffness/penalty?
I ensured that the friction coefficients entered match what is known for the given two materials in contact. I assume the next thing to do there increase friction penalty until it shows convergence?
About the imprint stuff, that is the reason why I firstly pointed the importance of doing the Move operation for your CAD, and then after that imprint. Please take a look:
The SimScale documentation of imprint only says that it splits the faces where the contact is.
This absolutely helps the contact detection
Yes.
I didn’t get why you cannot modify it, once it is physically wrong to have this amount of interference. The main thing I see is not modifying penalty coefficient yet. I firstly suggest you to fix the CAD geometry penetration (back to move operation).
Absolutely not necessarily. Just before changing any penalty parameter:
1 - Match diameter faces (bushing-hinge; pin-bushing) by doing a move operation in each diameter;
2 - Apply imprint operation;
3 - Apply the force as suggested previously.
That’s the first basic things to do, and after that we can change some parameters according to how simulation runs
Okay, I thought you meant using move with the pin/bushing just for the purpose of imprint to be able to work there, not also using it for the hinge/bushing, and maintaining the faces in position after move to effectively remove the interference and clearance between the aforementioned faces before importing the geometry into the simulation. Though I am new to FEA, I am fairly proficient with CAD, I just had some trouble understanding the intent.
With this hopefully cleared, I am totally confused about your suggestion now. How would SimScale be able to simulate the correct contact pressures and deformations without correct interferences in the geometry? I thought this is the whole point of Physical Contacts in nonlinear simulations. Please help me understand your high level approach / how your are suggesting SimScale will be able get the dimensions of the interferences/clearances for the simulation?
No high level approach is required, for any simulation software you will need to correctly detect interfaces before simulating. No worries about your skills in simulation, please always enjoy to explore our documentation library.
After some digging, I believe your intent may have been to guide me to later use Fictitious Clearance to restore the geometry dimensions after setting up the contact flush as you describe. Which would make a ton of sense, and I can see how it would help the solver.
I doesn’t help that Fictitious Clearance is not clearly defined in the SimScale documentation – I posted a suggestion to clarify the doc. It is usually known as something like Contact Offset in other software, but examples that are the first find are usually setup starting with the geometric interference like I did and let the contact solve.
I will update the geometry later and follow your steps and report on progress. I appreciate you following up on my topic @goncalves, please be patient, I only ask these questions to understand the suggestions, and it took me a while without understanding this key point. My hope is that this topic can be useful to others as well.