Hi, i need to analyze how much torque this gear set up can handle. smaller one is master gear (torque comes in) and bigger is slave (torgue comes out). I know setup is not correct but I did not find example how it should be.
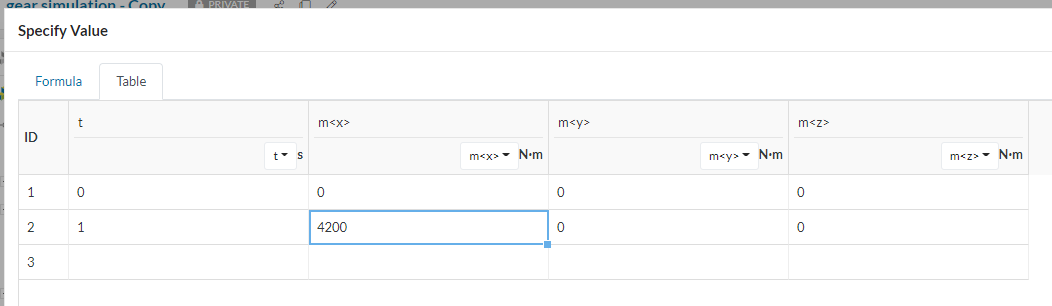
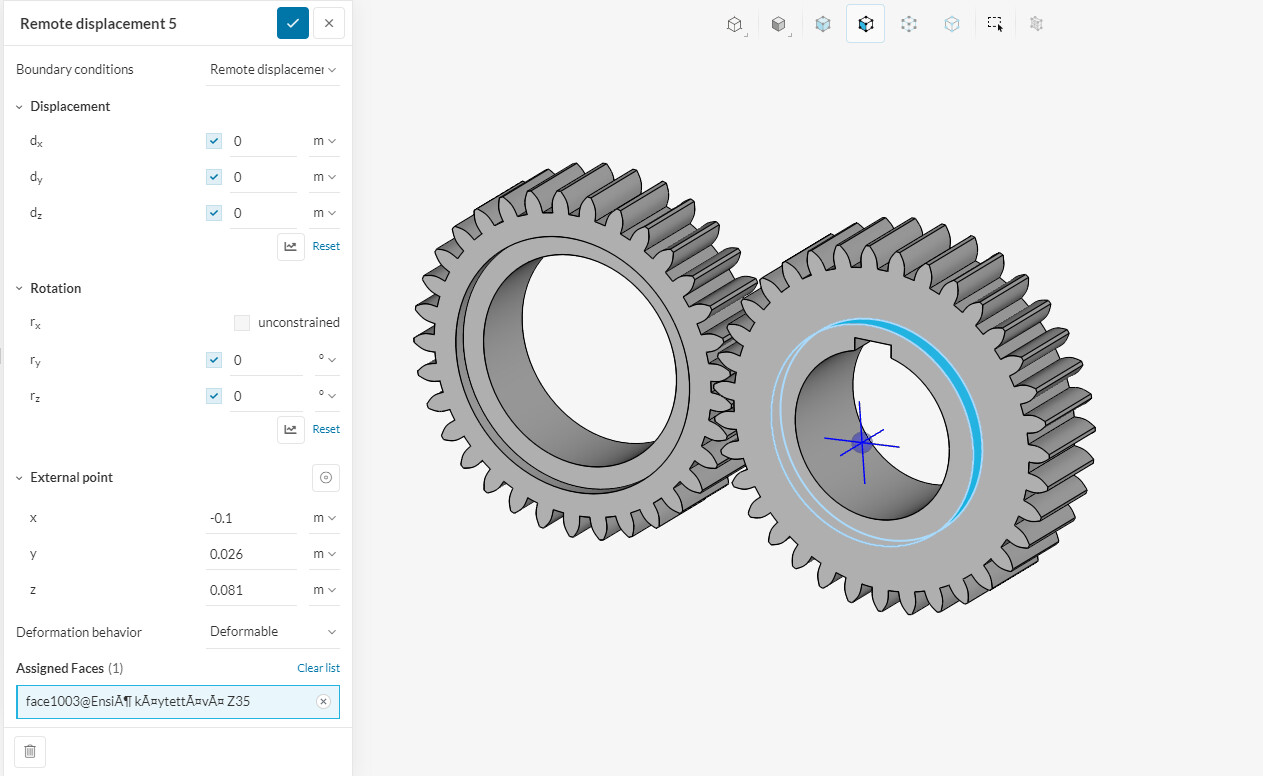
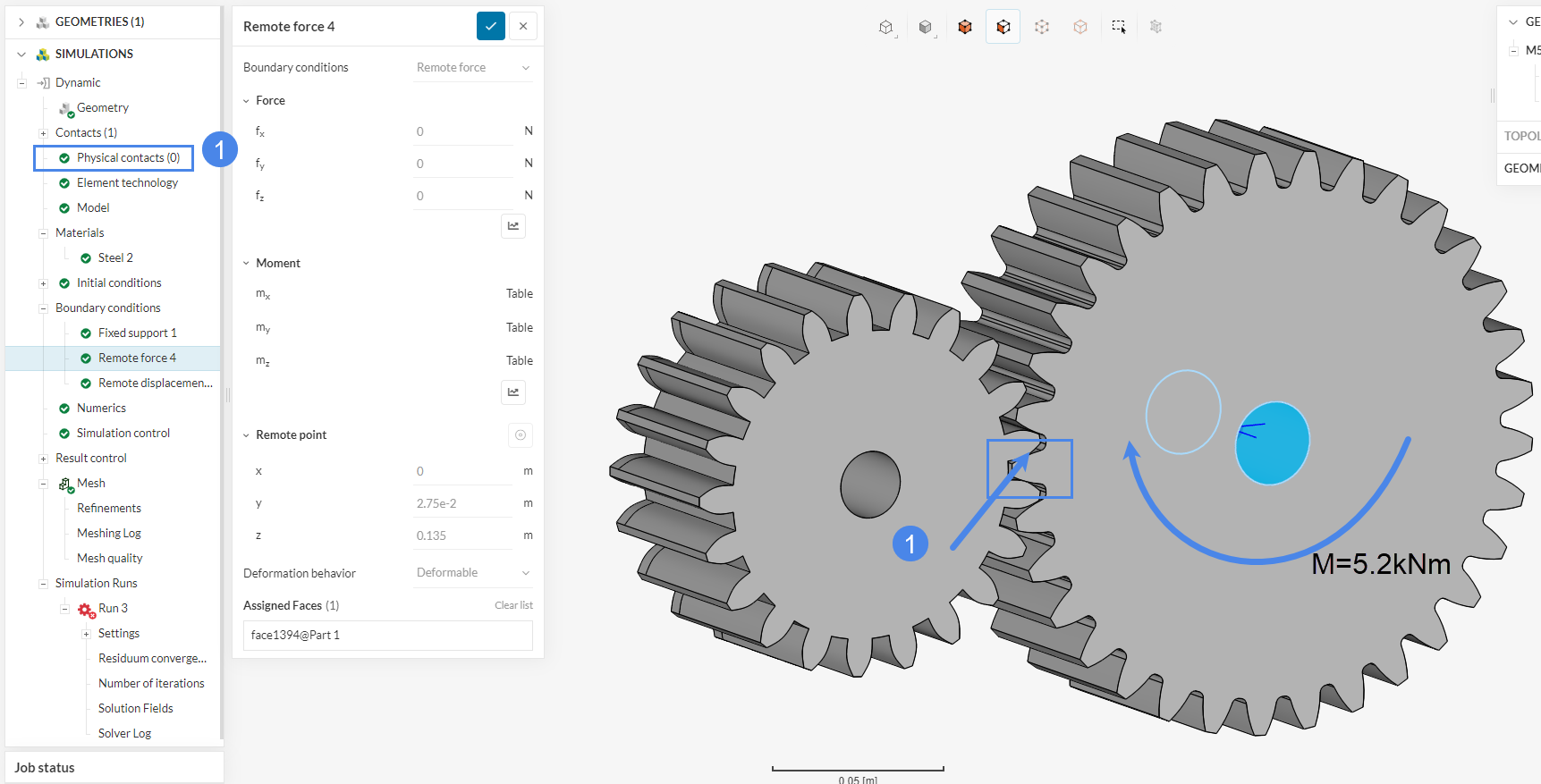
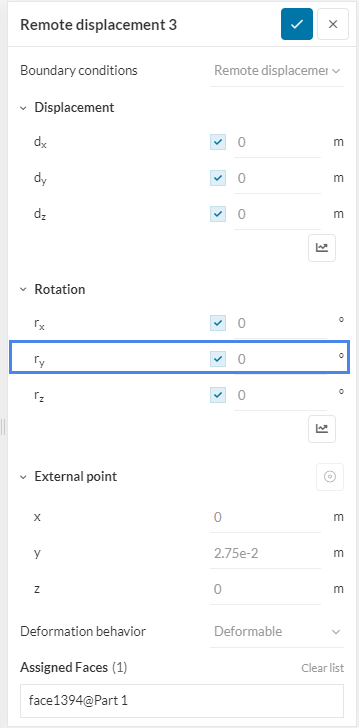
For the hinge boundary condition and the remote force please ensure that the reference point is set to the origin of the axis of the drive gear. (the values i have here are just eyeballed, please measure them in your CAD Software)
Newton convergence could not be reached. Possible options to prevent that behavior: Update the tangent matrix more often, increase the maximum number of iterations, use automatic timestepping or decrease the timestep. Learn more.
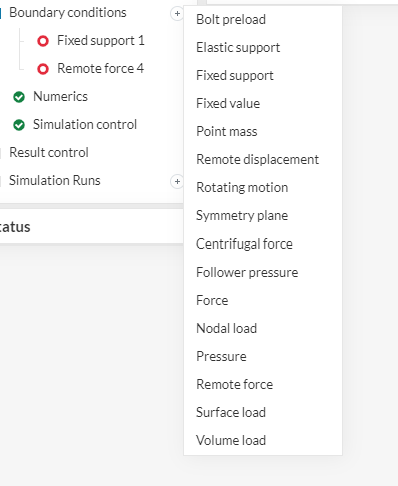
Still no luck with this. I think everything is correct ( excep instead of remote displacement boundary I have rotating motion since it failed with remote displacement)
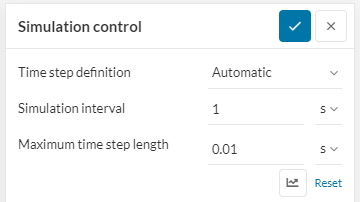
This is my final try https://www.simscale.com/workbench/?pid=1045158511123030526&rru=22bfcbf1-1420-4eb6-98d1-4e98bef02e52&ci=5eb051e3-045f-4fb1-86cd-46c66b952a46&mt=SIMULATION_RESULT&ct=SOLUTION_FIELD and now I am getting this: “The specified maximum runtime of the job was exceeded. The simulation run was stopped and potential intermediate results were restored. You can try to increase the maximum runtime in the simulation control section and start a new run to enable a complete simulation run.” What I need to change in order to get this right and calculated without timeout.