Try to solve a linear elastic contact problem of wheel-rail interaction. Geometry model imported as iges file. Use symmetry option in XY plane. The rail divide in to 2 part because of in the future plane to make mesh in contact region more fine. Face with symmetry options on wheel and rail constrained in longitudional direction. Two face on wheel constrained in lateral direction. Bottom surface of the rail fixed in all directions. Between wheel and rail physical contact. I tried to solve it in one step and with substeps. In both cases I recieved the same errors The solution matrix is singular at edge. Can`t understand what is wrong.
Hi agarkov,
please have a look at this article on how to solve this type of error:
if the solution is not mentioned in this article please reach out back to us.
Best reagrds
Sebastian
Hi, SBlock. I have read about the possible causes of the error, but cant find my error. The strangest that solutions matrix singular at the edges which belong to the rail. Rail have a fixed support. It can`t be unconstrained. Maybe you have some other ideas about possible reasons for this behavior? Thanks a lot!
Hi agarkov,
I changed the fixed value to support to only include the top part, with that the lower part is not over-constrained and i was able to run the simulation.
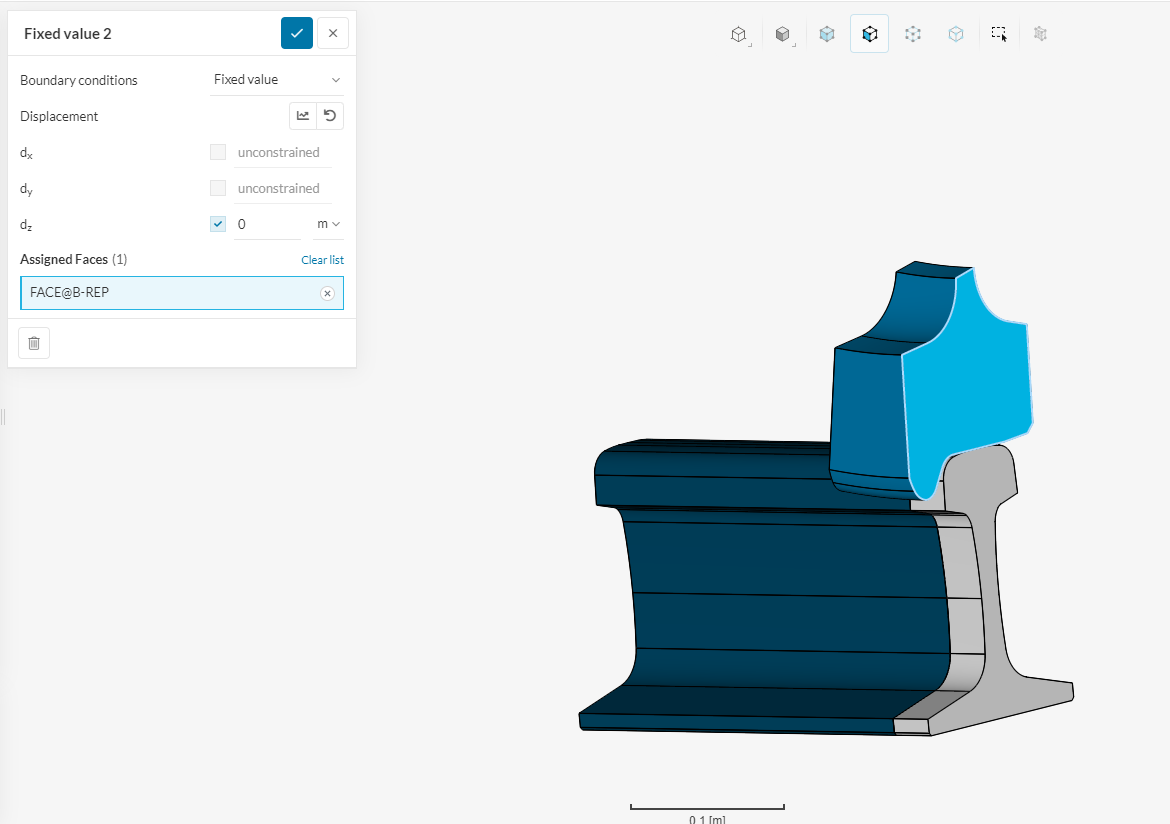
I also changed it to linear analysis and the contact between the wheel and the rail to sliding.
Can you try this for yourself and see if it works for you aswell?
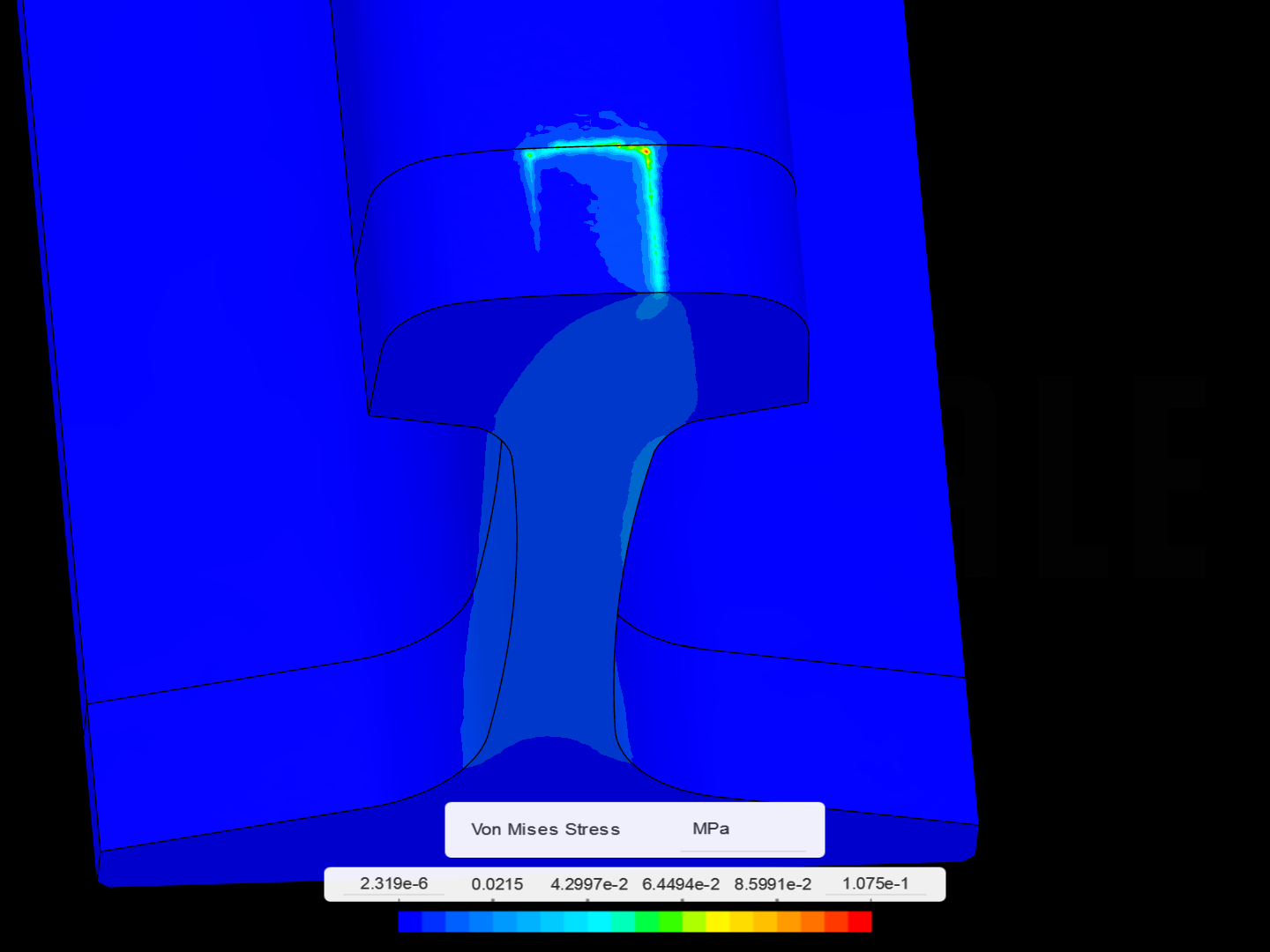
Hi, SBlock. Thank you for your help. Really, these steps helped me to finish my solution, but results look very strange. Maximum equivalent stress realized in the place, where will be no contact. May be you can explain me some things?
- Is it really correct to take away fixed value from rail in longitudional direction if there is a symmetry condition and could not be strain in longitudional dirrection? In ansys there is a symmetry or unsymmetry condition on the corresponding faces. How to implement it correctly in SimScale?
- You suggest me to use sliding contact, but according to Simscale documentation in can realize only tangentional contact. There are no stress-strain in normal direction. Solution of this example will look like hertzian contact with maximum equivalent strees in rail deeper on 3 mm from rail surface. As I saw in example with rubber wheel and ground, physical contact used there. May be you know what was wrong with physical contact in my example?
- As the next step I want to try to realize with force in normail direction, torque. I saw only options to apply rotation. Are there any options to apply torque? May be you know any example or documentations where I can find it?
Thanks a lot!
Hi agarkov,
-
For sure you can use a symmetry condition.
Symmetry | Boundary Conditions | SimScale -
Yes I selected the sliding contact to not have to solve it for non-linearity, because I don’t know the time-dependent variables for your simulation. In that regard, you can use the definition you have set up before.
You can have a look at this tutorial it also explains how to use symmetry boundary conditions.
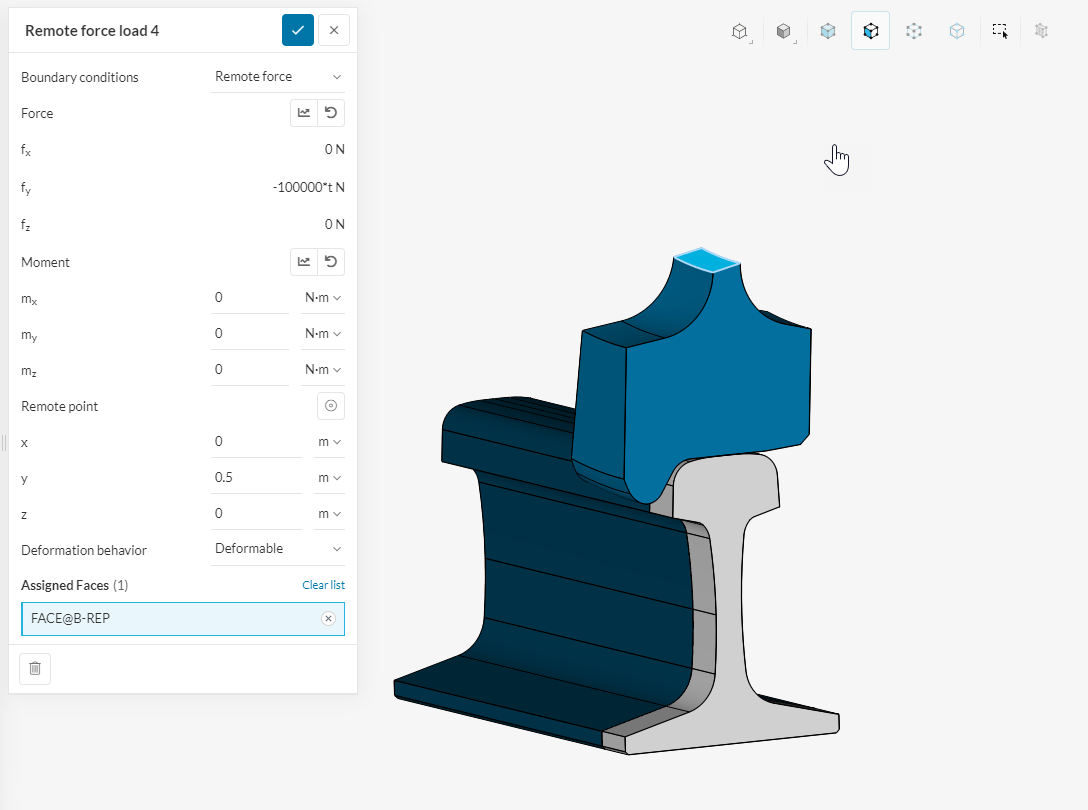
- To apply toque you can use a Remote Force Boundary Condition.
Remote Force | Boundary Conditions | SimScale
I hope I could answer all your questions.
Best regards
Sebastian
Hi, Sebastian. Thank you for your help. Problem is when I try to use physical contact I recieved a solution matrix singular. And this problem realized in the rail, not in contact zone. My problem is static with load on the wheel 100 kN. I tried to apply 100N but have the same problem. May be you can help to me with understanding what is wrong?
Best regards, Oleksandr.
Hi agarkov,
sorry for this very late answer.
We have made quite some changes to the case.
- physical contact definition.
We switch the master-slave assignment for the contact definition, to reduce the number of slave faces.
Boundary conditions.
-
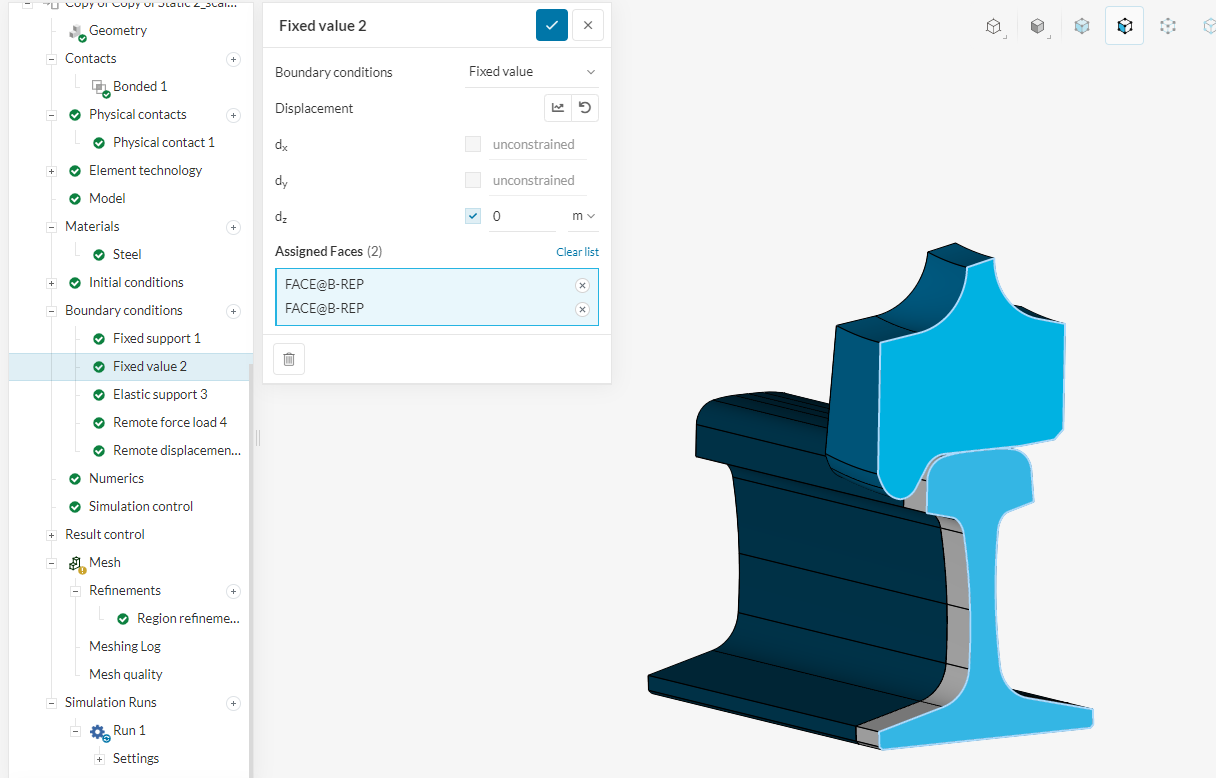
Fixed Support for the bottom stayed the same.
-
Fixed support in y direction for the symmetry faces
-
Remote Force definition in the center of the wheel, with the definition of a Formula to ramp up the Force application
-
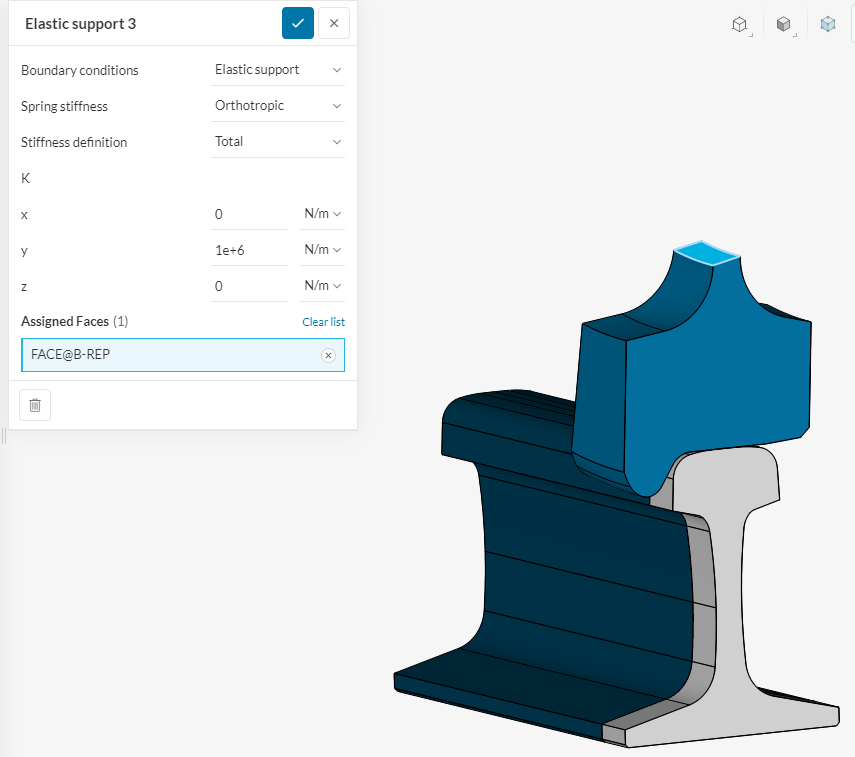
Elastic Support for the top face to stabilize the simulation.
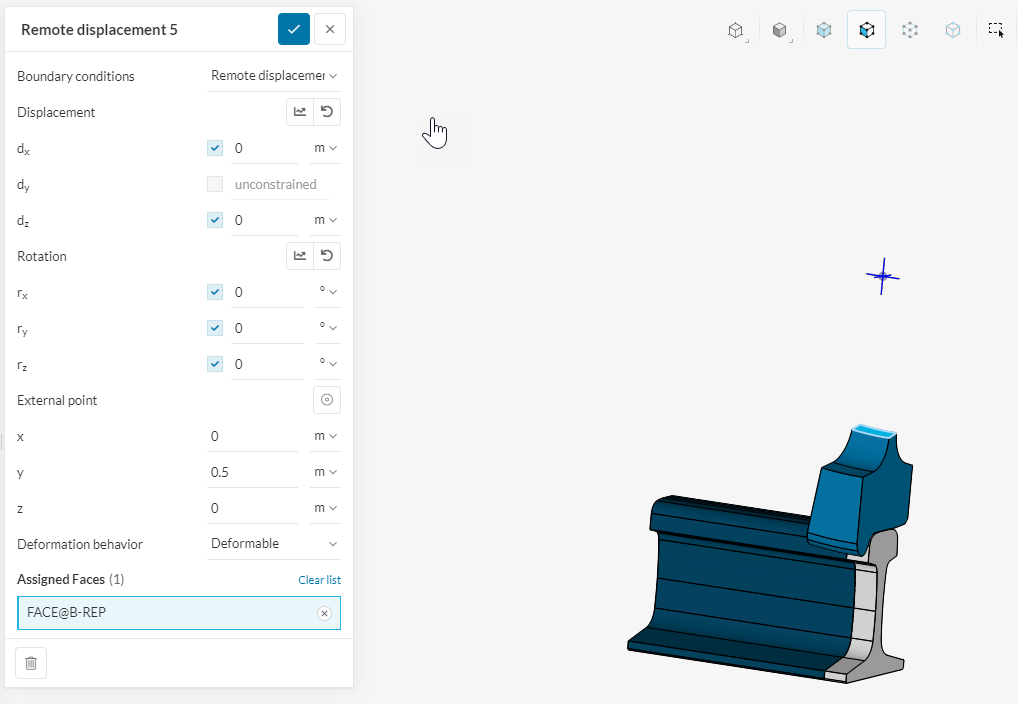
-
Remote Displacement for the top place limiting the movement into the y direction to further stabilize the simulation.
Lastly, we further activated the result control items for the contact results.
We further have the question of whether it’s okay for you that in this case the overall stiffness of the wheel and the weight of the wheel are neglected.
Here are some results of the stresses in the contact region. For a very coarse mesh.
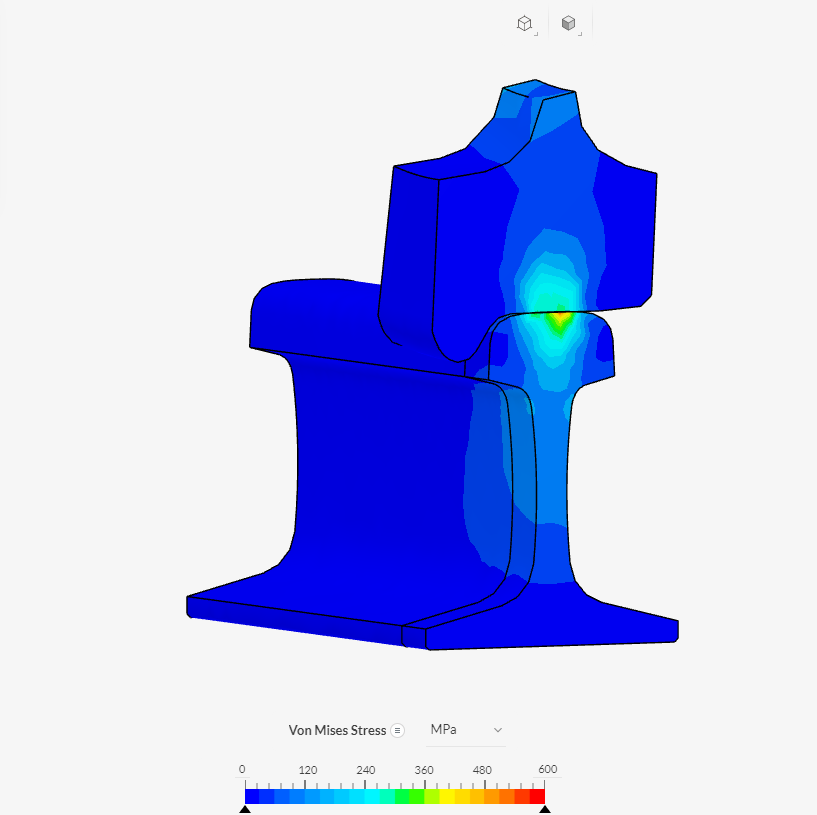
Hope that this helps.
Best regards
Sebastian