The present project is aimed to investigate the aerodynamics of an LMP1 racing car designed by the Nikolas Perrinn’s team. In addition to the aerodynamics of a single car, the drafting and overtaking characteristics of the car is investigated. Moreover, the aerodynamic performance of the car in a non-zero Yaw angle is investigated. Some quantitative information on the flow and geometrical conditions are as follows:
-
The speed of the car is set to 250 km/h.
-
In the case of the drafting cars, the distance between the front of the car that drives ahead and the front of the other car is 5.5m. It means that the cars drive with a distance of around 0.85m.
-
In the case of the overtaking cars, the distance between the cars is 0.25m.
-
For the case with a non-zero Yaw angle, the Yaw angle is set to 10 degrees.
A link to the project: Perrin-LMP1 by roozbehmousavi | SimScale
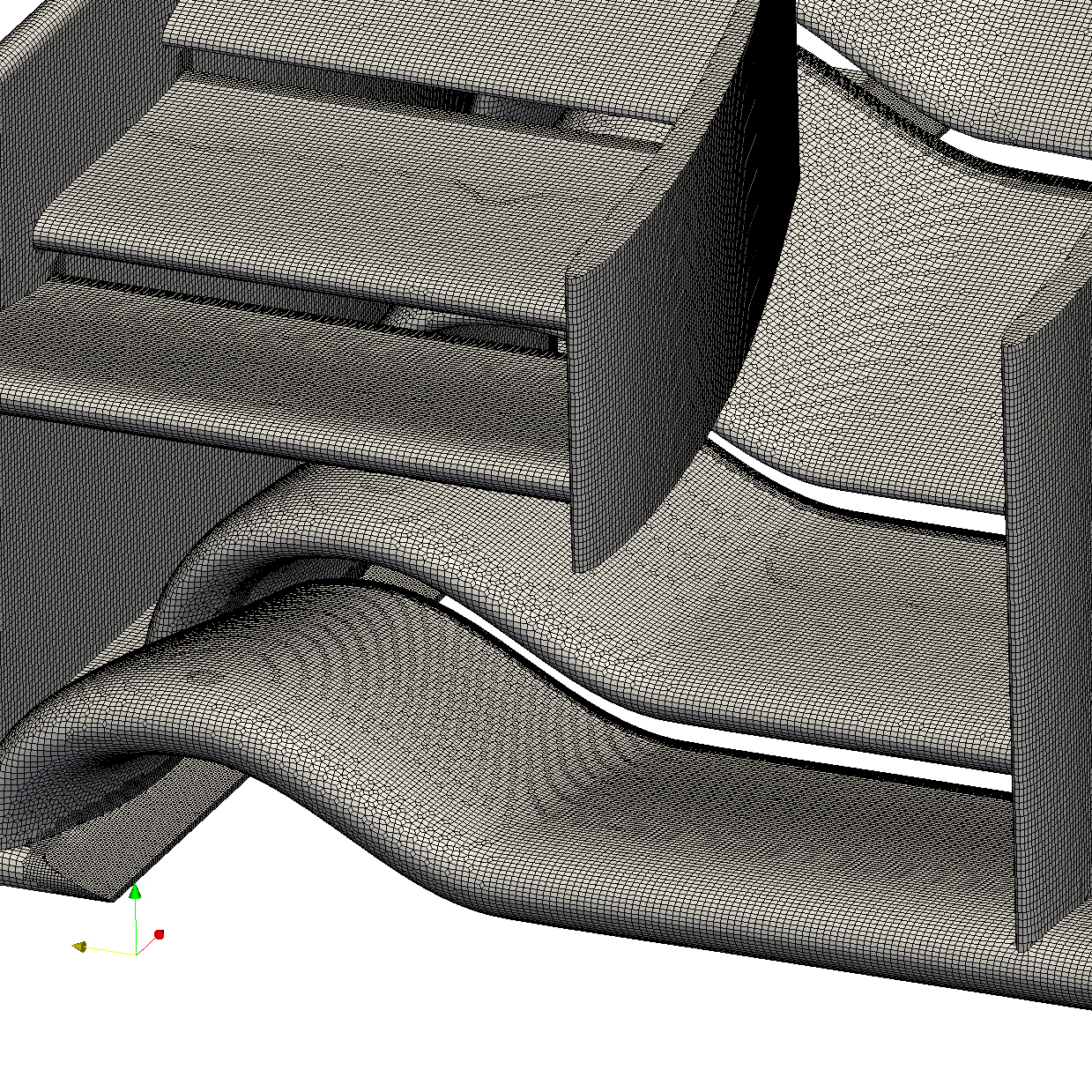
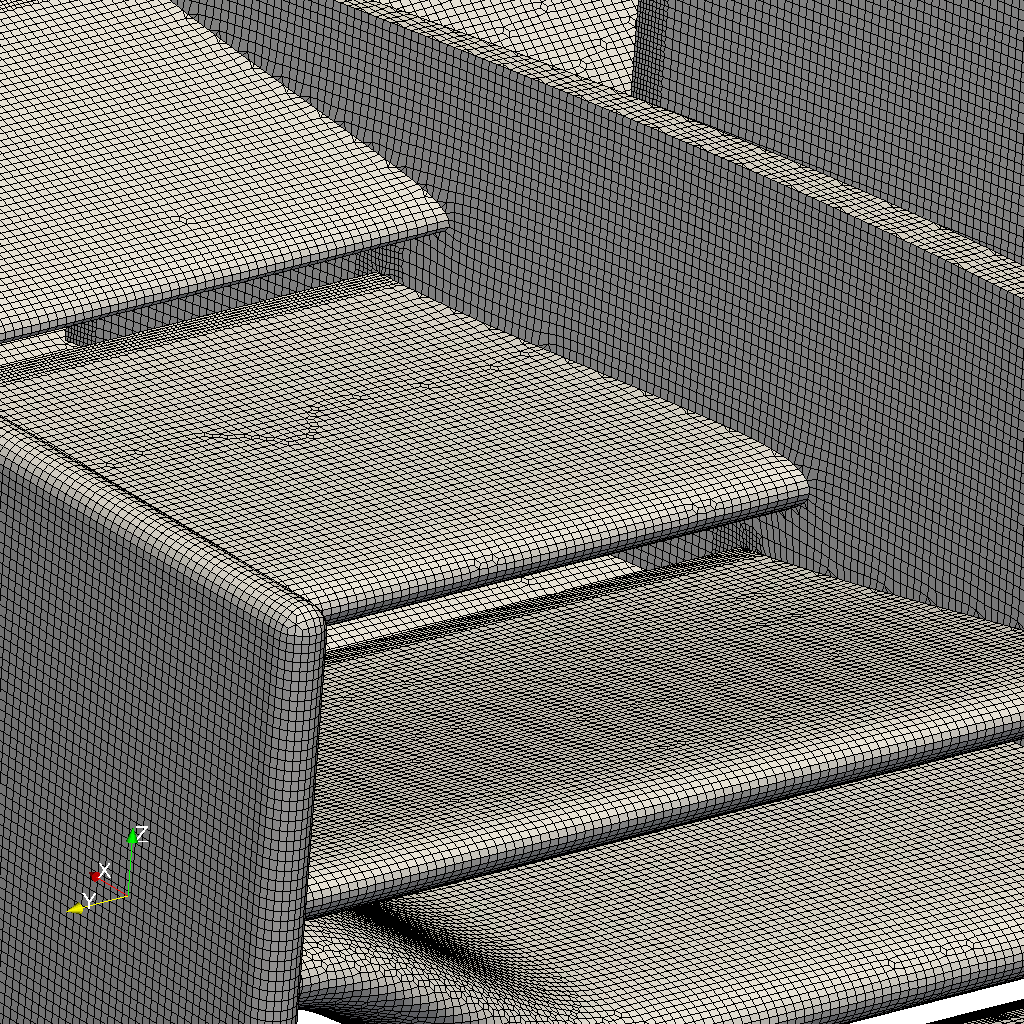
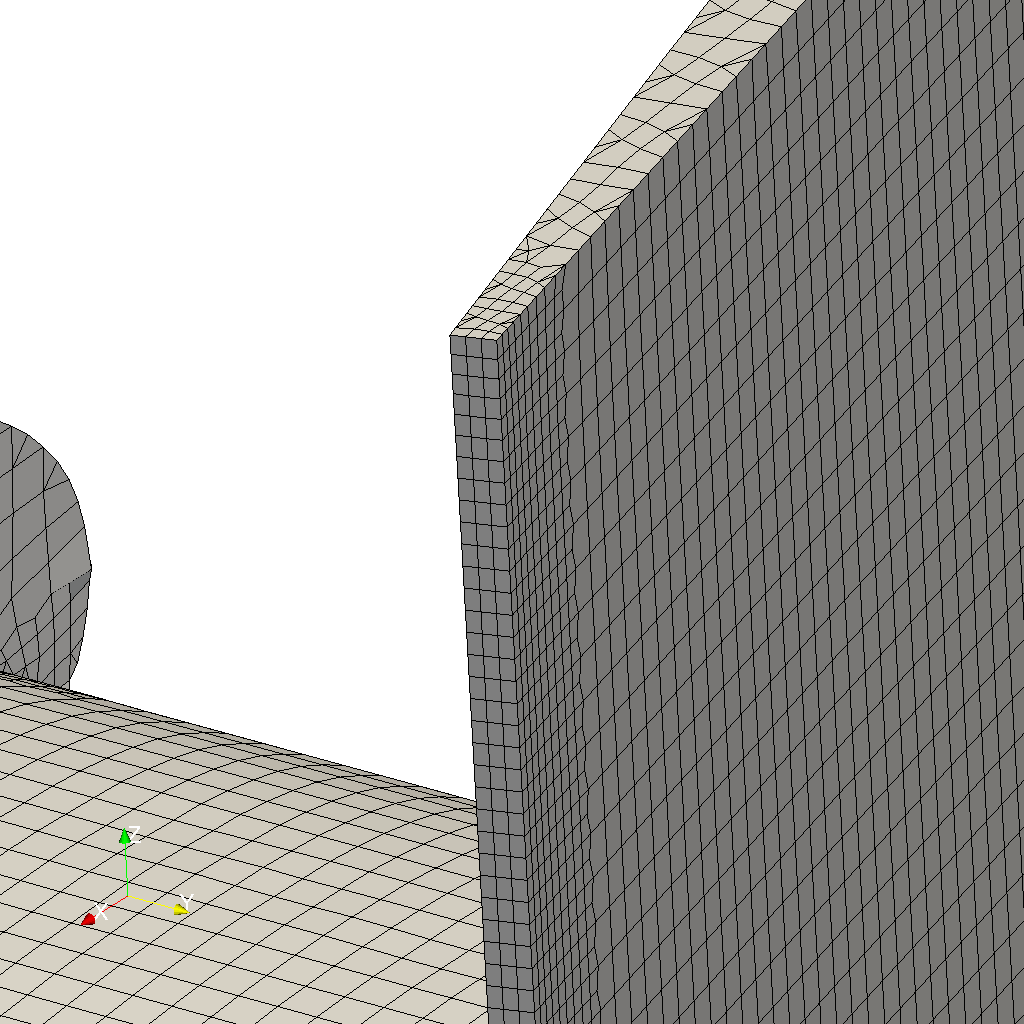
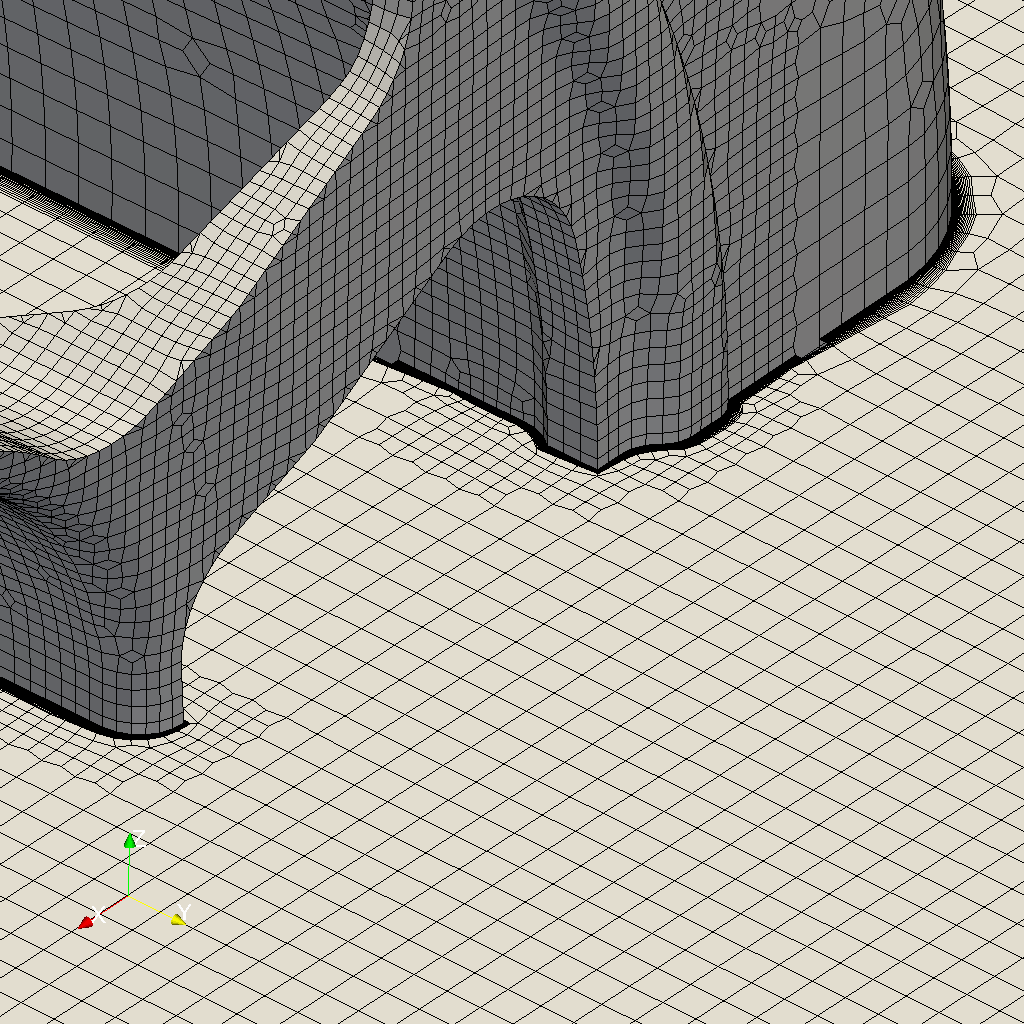
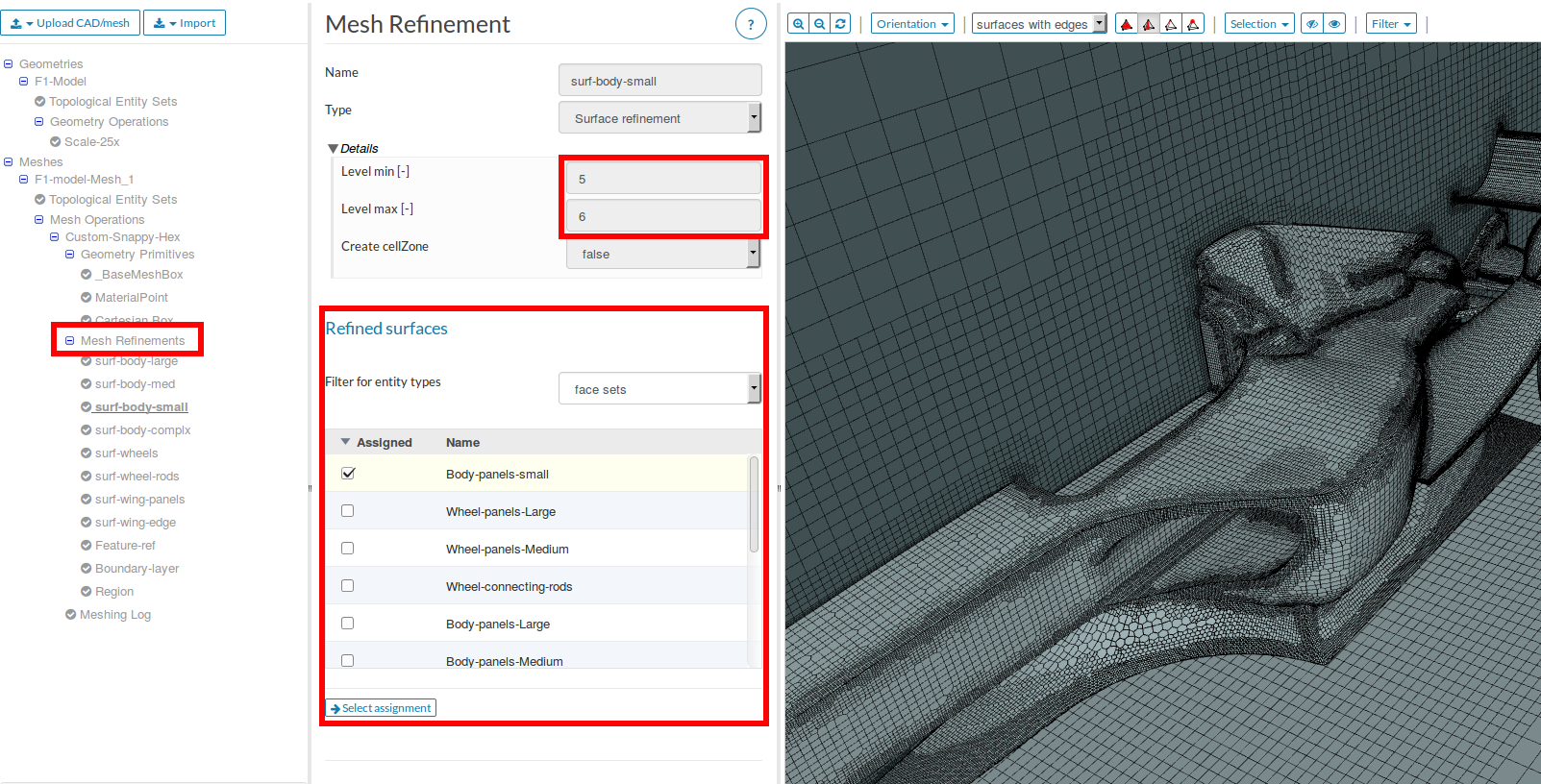
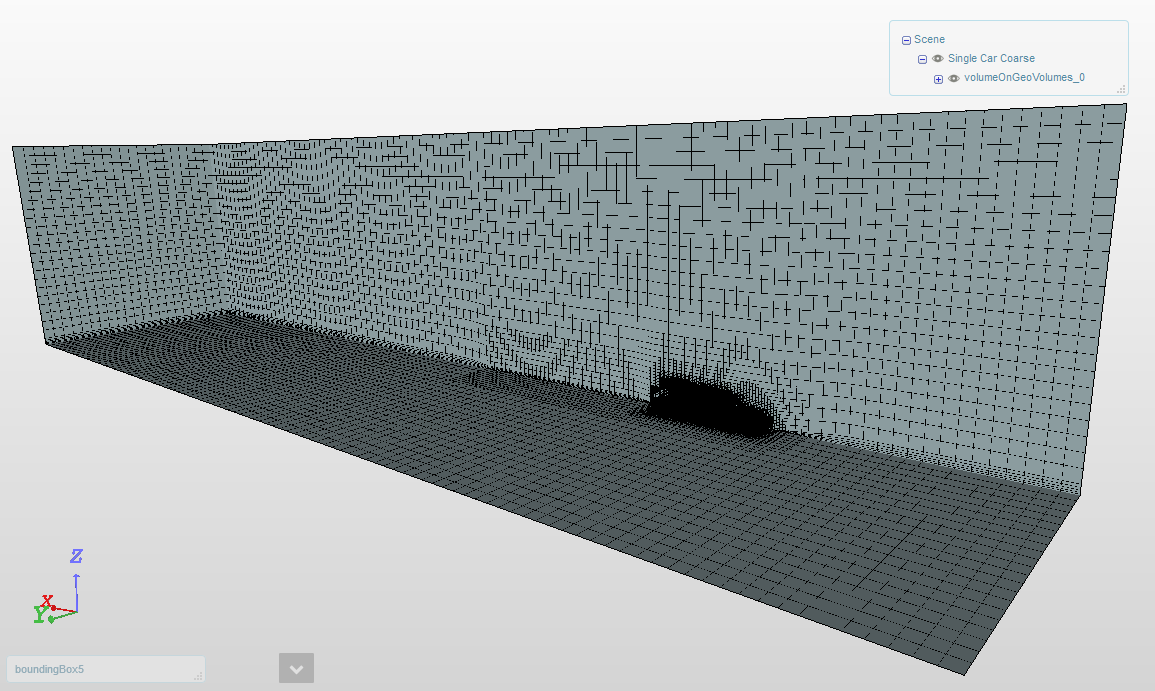
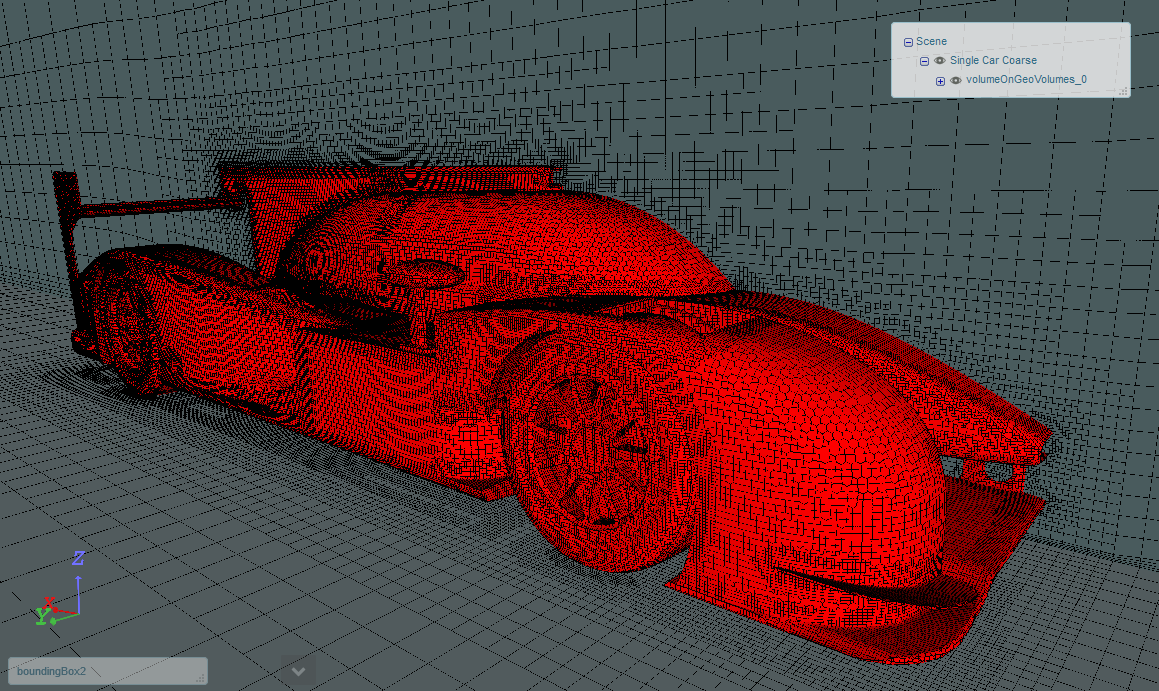
The following picture shows the grid used for a single car.
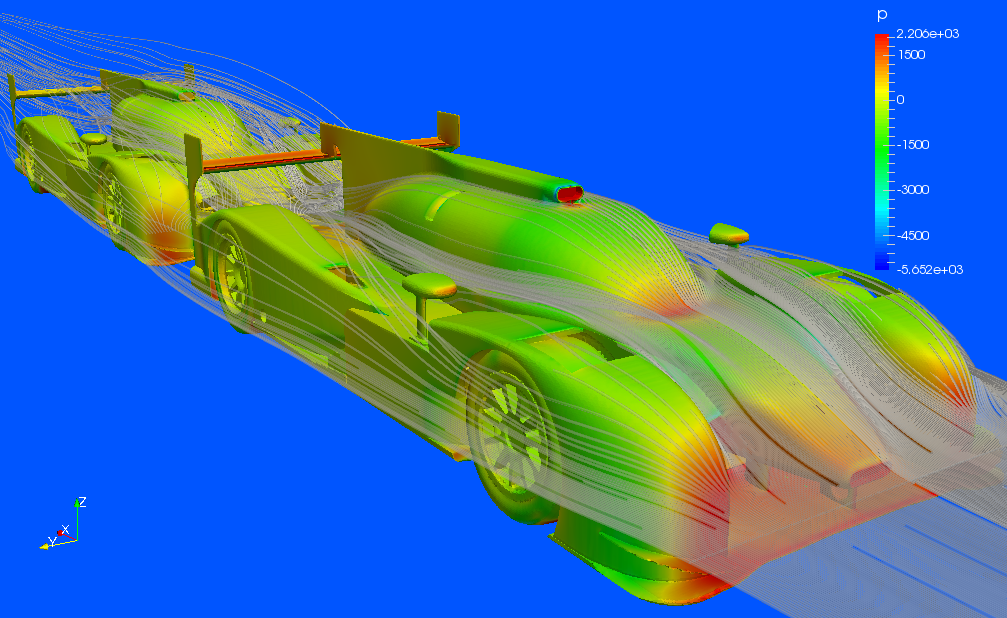
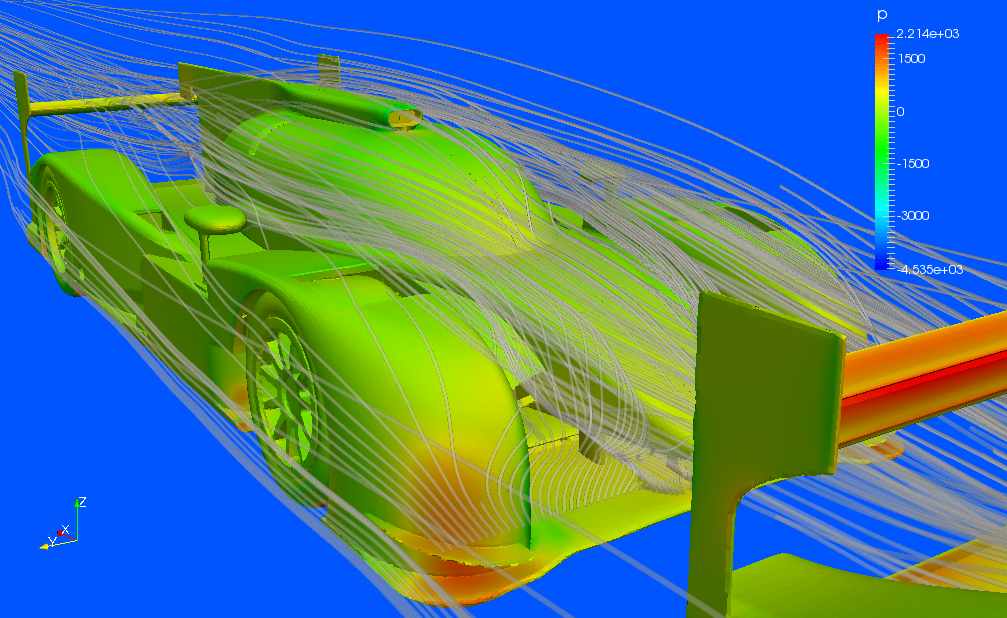
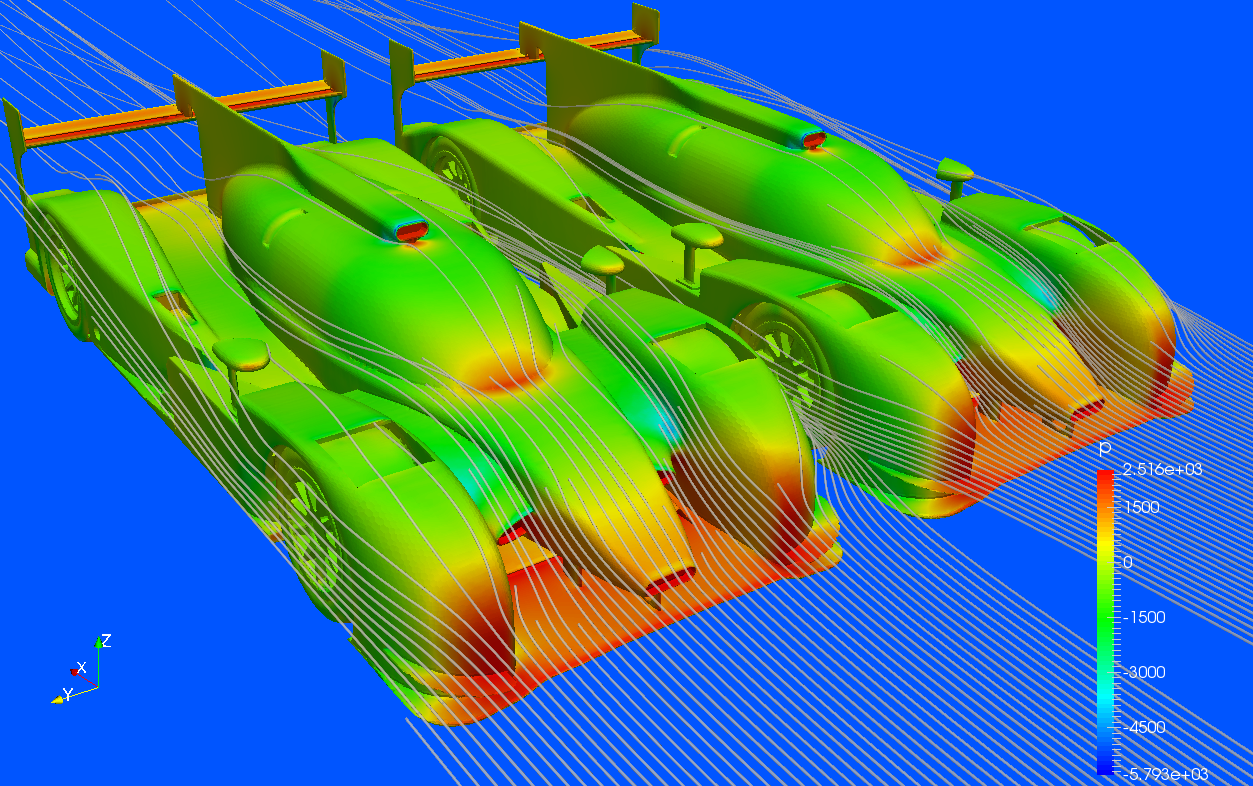
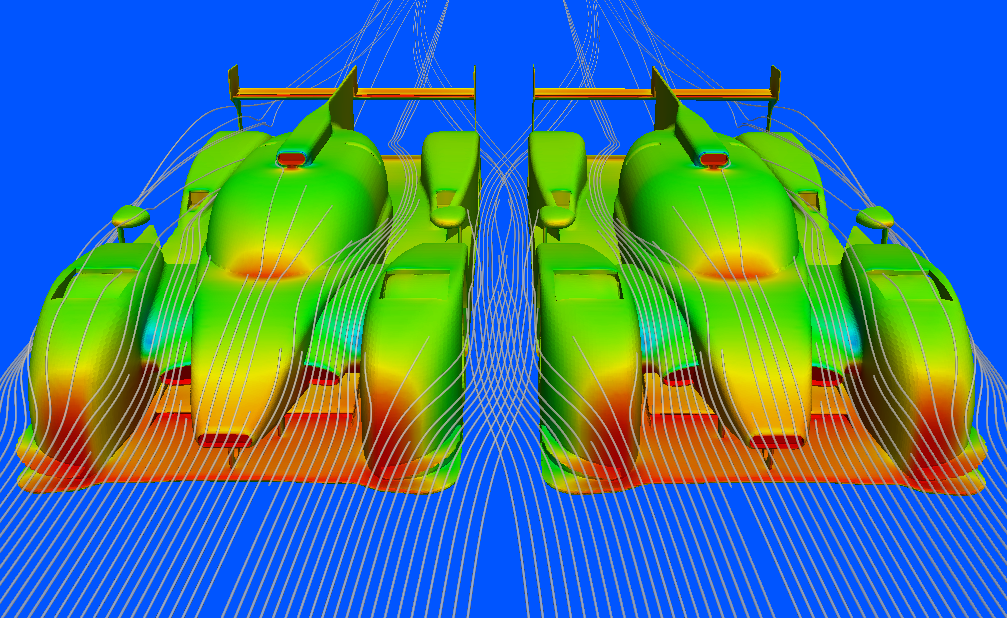
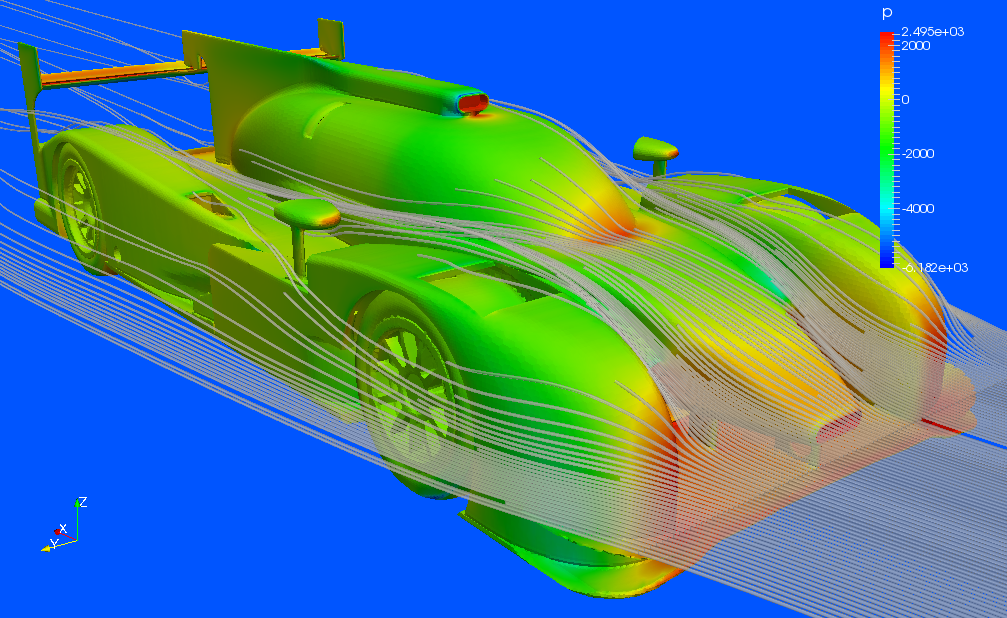
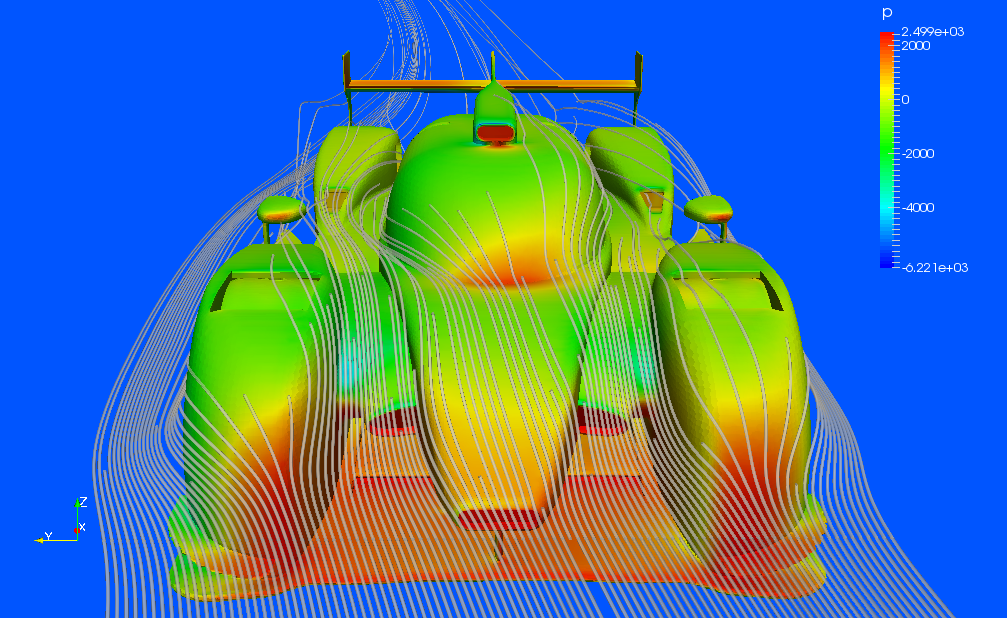
The following pictures show the pressure field over the surface of the car for different cases, as well as the streamlines:
-
Single car
-
Drafting cars

- Overtaking cars
- Single car in a Yaw angle
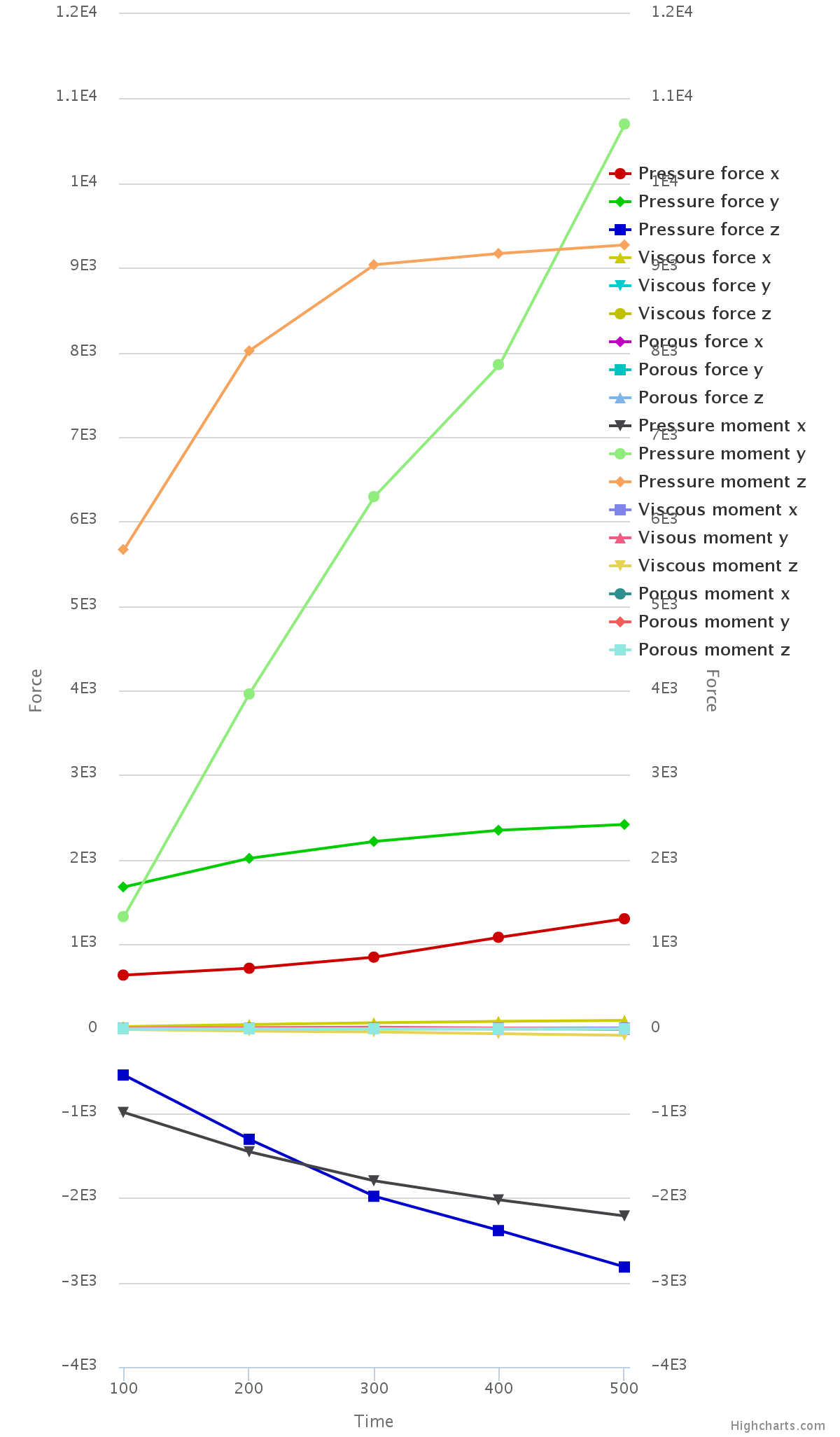
The drag force (D), the lateral force (B) and the vertical force (L) exerted on the cars in different cases, are as follow:
-
Single car:
D = 1199.42N
B = 0
L = -3182.23N -
Drafting cars:
Note: As a result of the high resolution of the STL file, the file could not be opened in my CAD software as a solid body. Therefore, I had to use the software meshLab to make a system of two cars. But the both cars could only be exported as a single surface. Consequently, the forces are computed for the both cars:
D = 1398.97N
B = 0
L = -2808,10N -
Overtaking cars:
D = 2541.14N
B = -621.17N
L = -7285.12N -
Single car in Yaw:
D = 2392.72N
B = 2731.24N
L = -6504.74N
As it is shown in the pictures, in the case of the drafting cars, the streamlines are less curved toward the car that drives behind. This explains a reduction of the downforce exerted on that car.
In the case of the overtaking cars, as it is shown in the second pictures, the streamlines of each car in the space between the cars, are deviated toward the other car. This explains the lateral force exerted on each of the cars toward the other car.
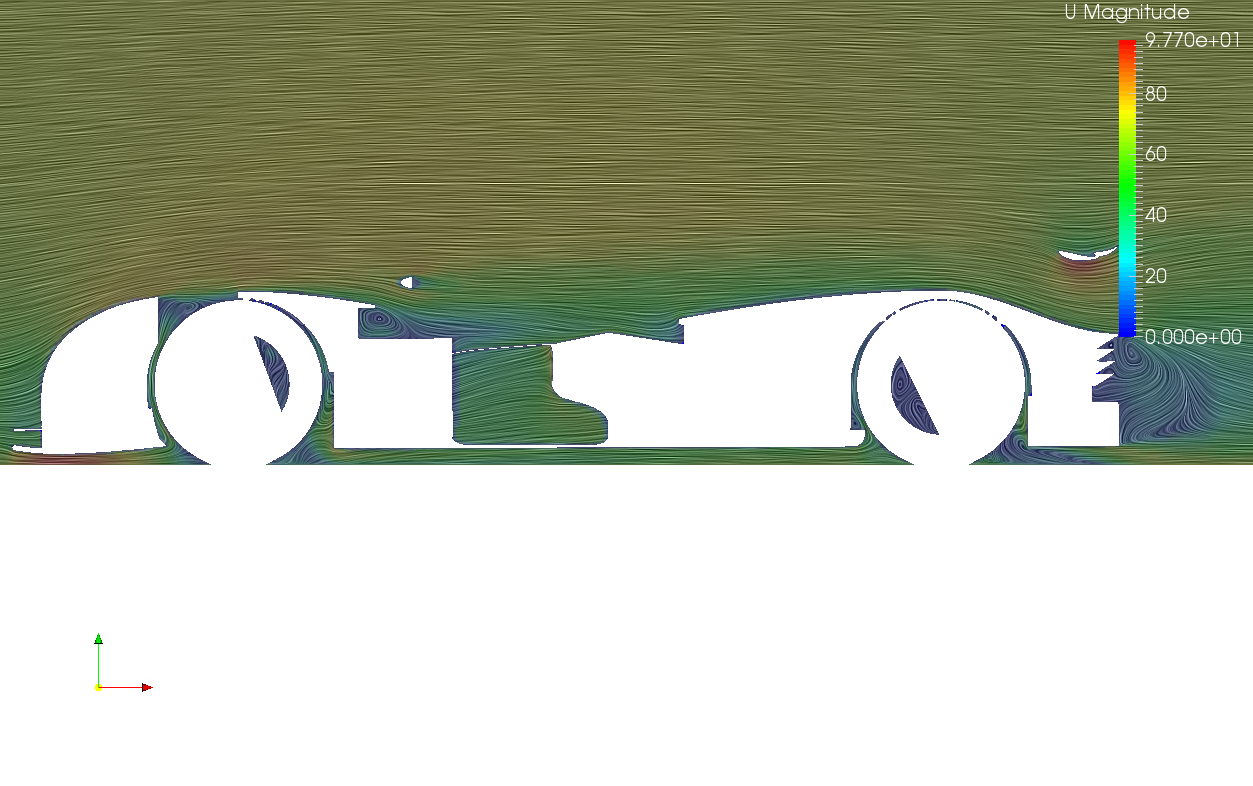
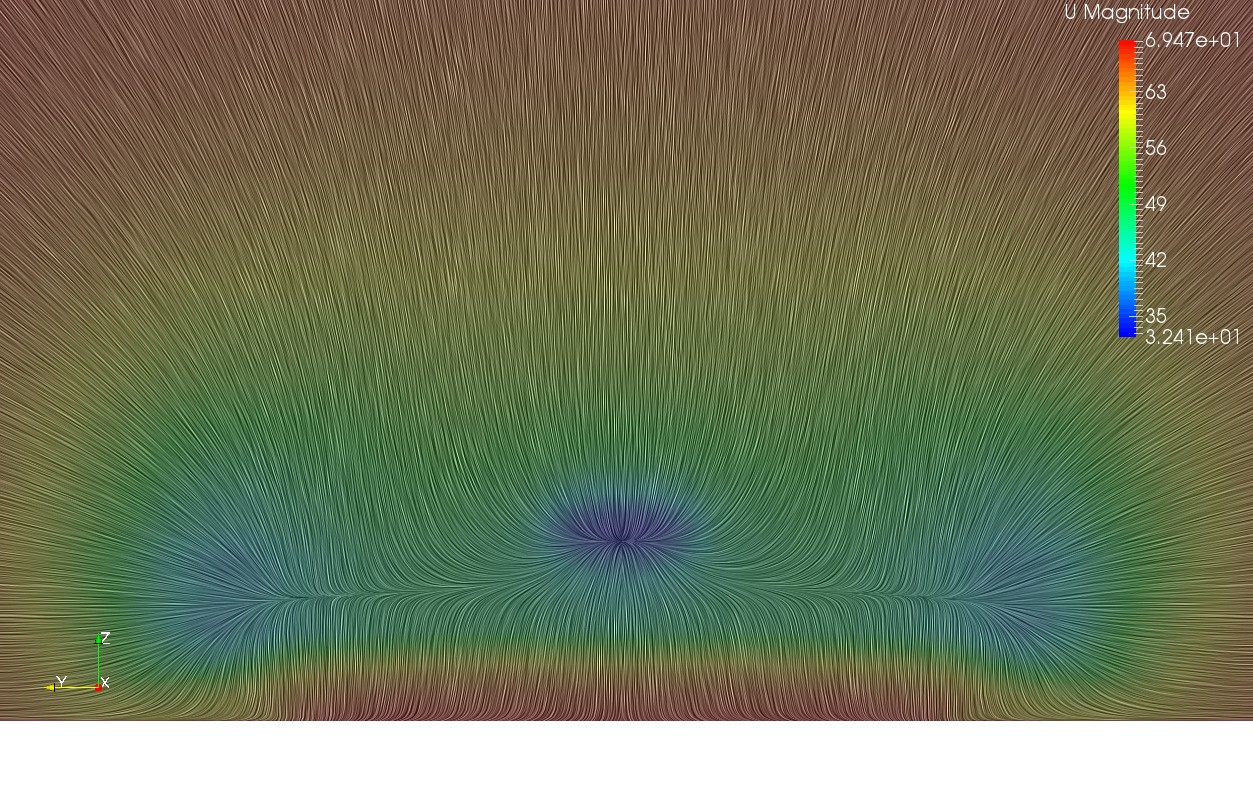
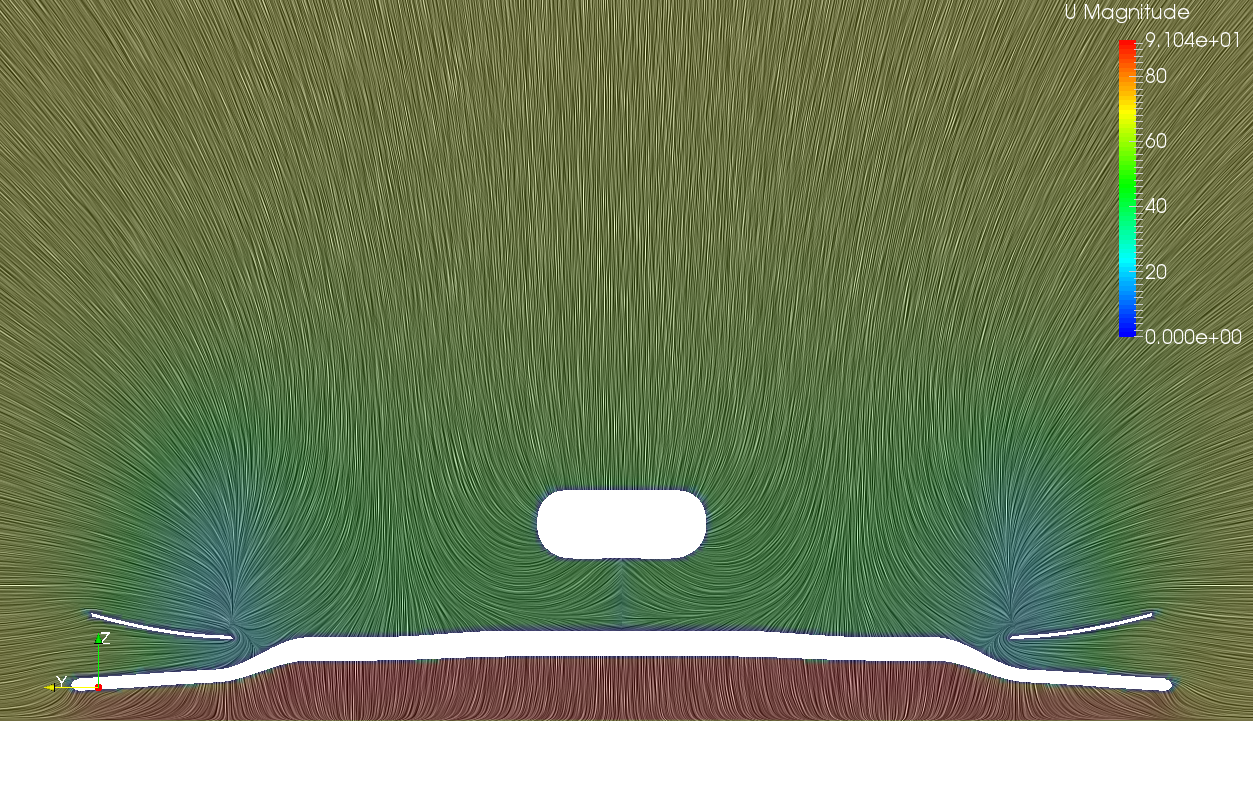
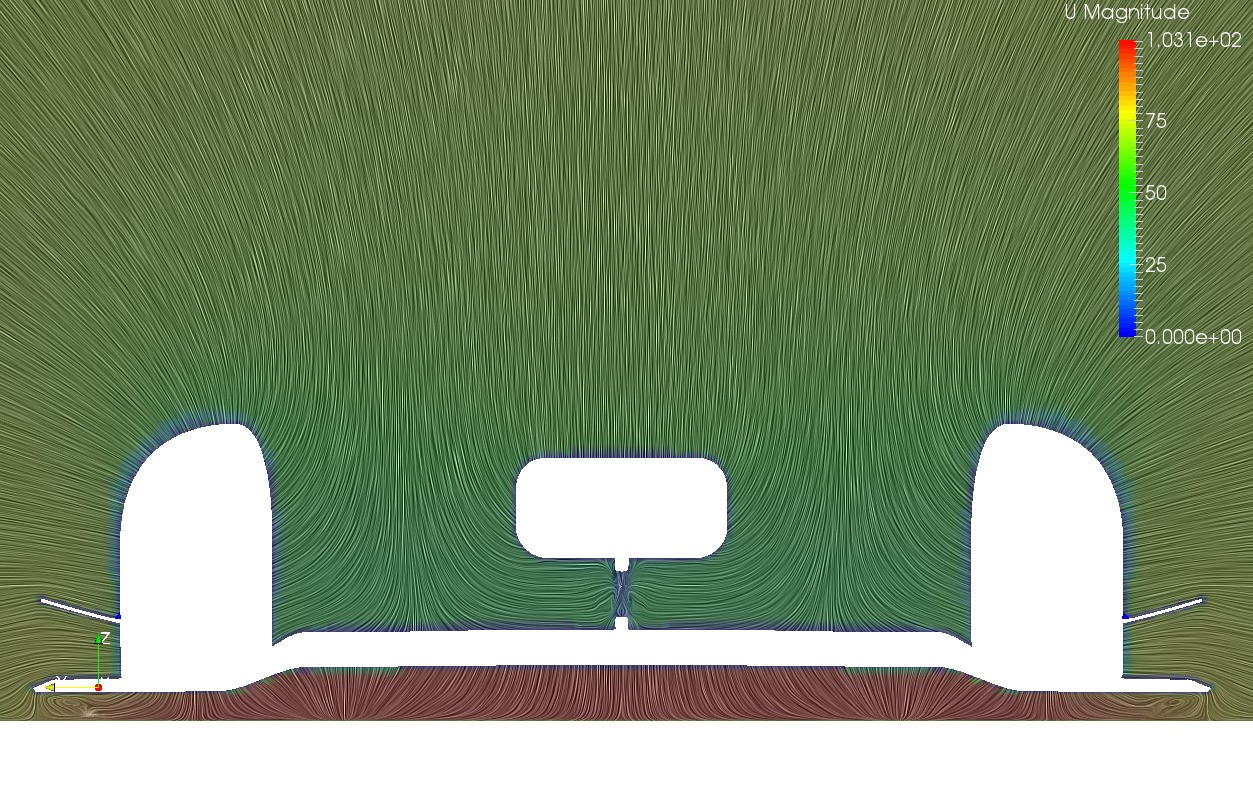
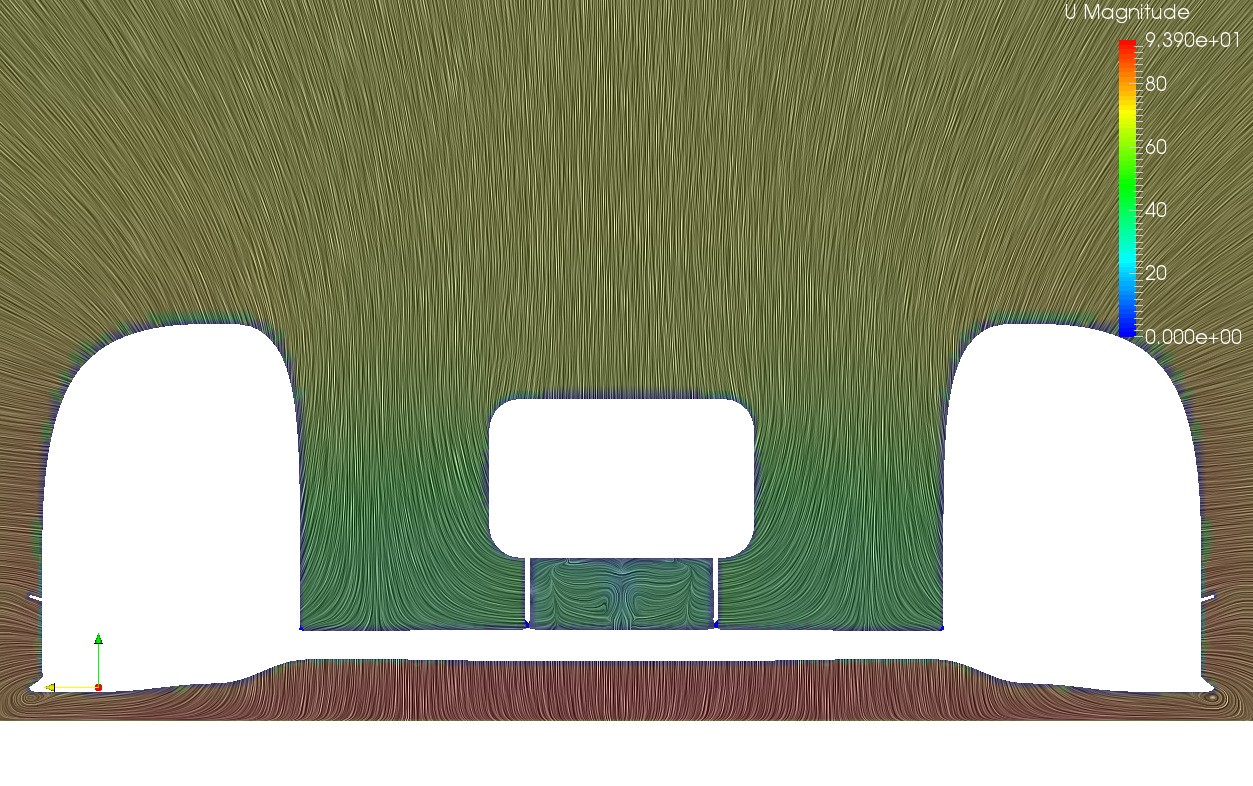
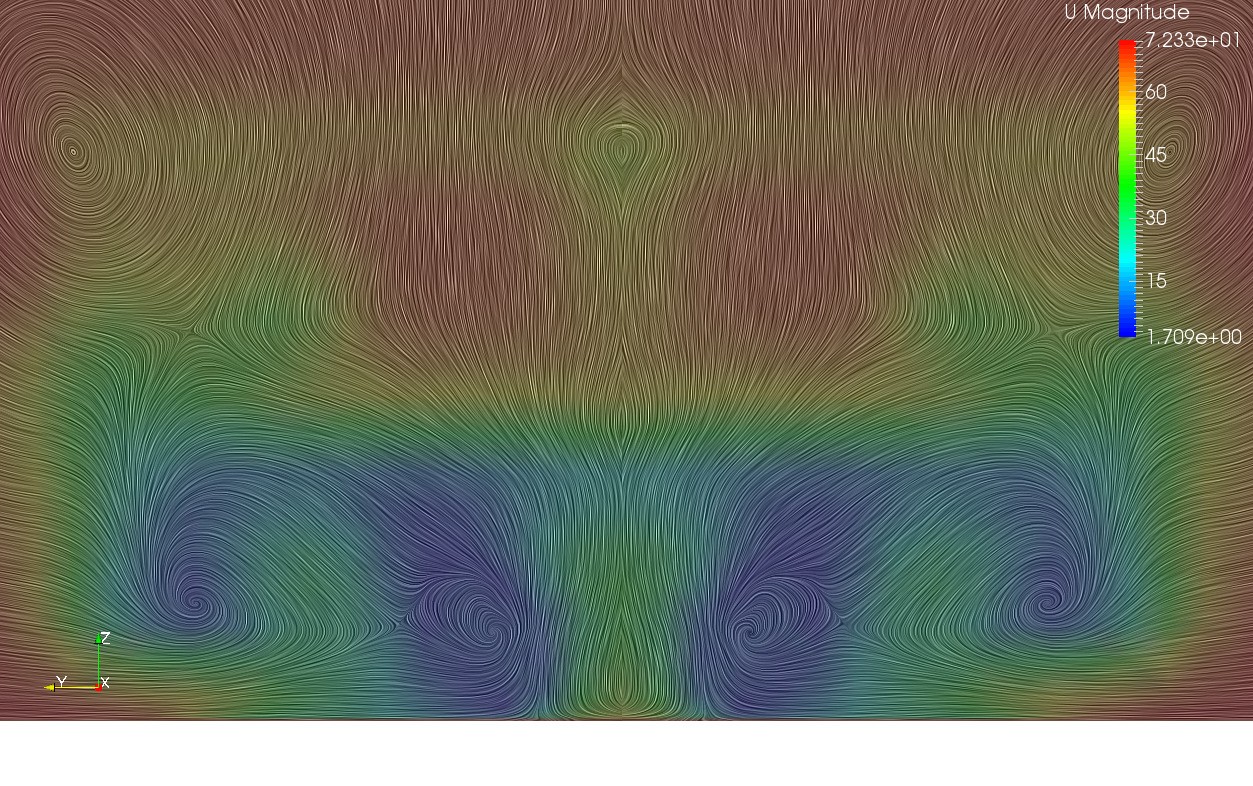
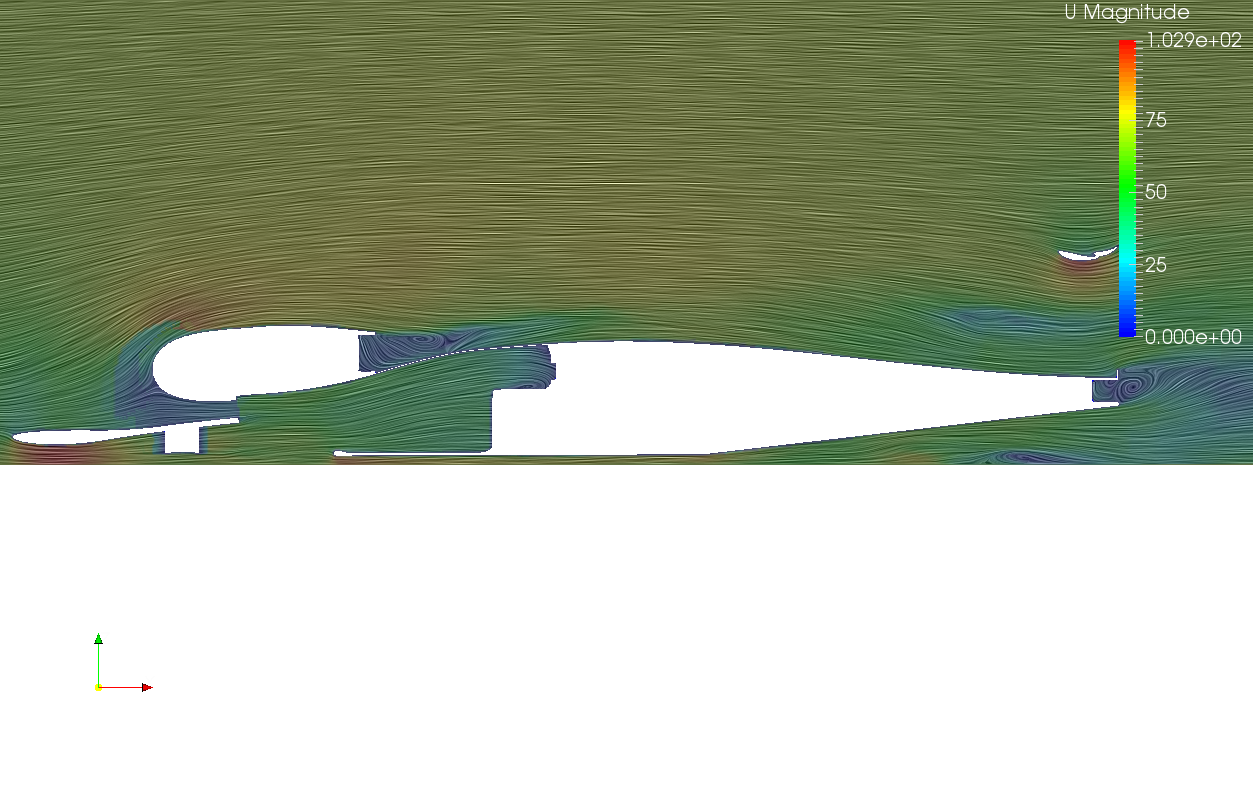
The following pictures show the flow field around the single car in different streamwise and lateral sections. (The x-coordinate of the front of the car is -1 and y-coordinate of the centroid of the car is 0)
x = -1m
x = -0.9m
x = -0.8m
x = -0.6m
x = -0.4m
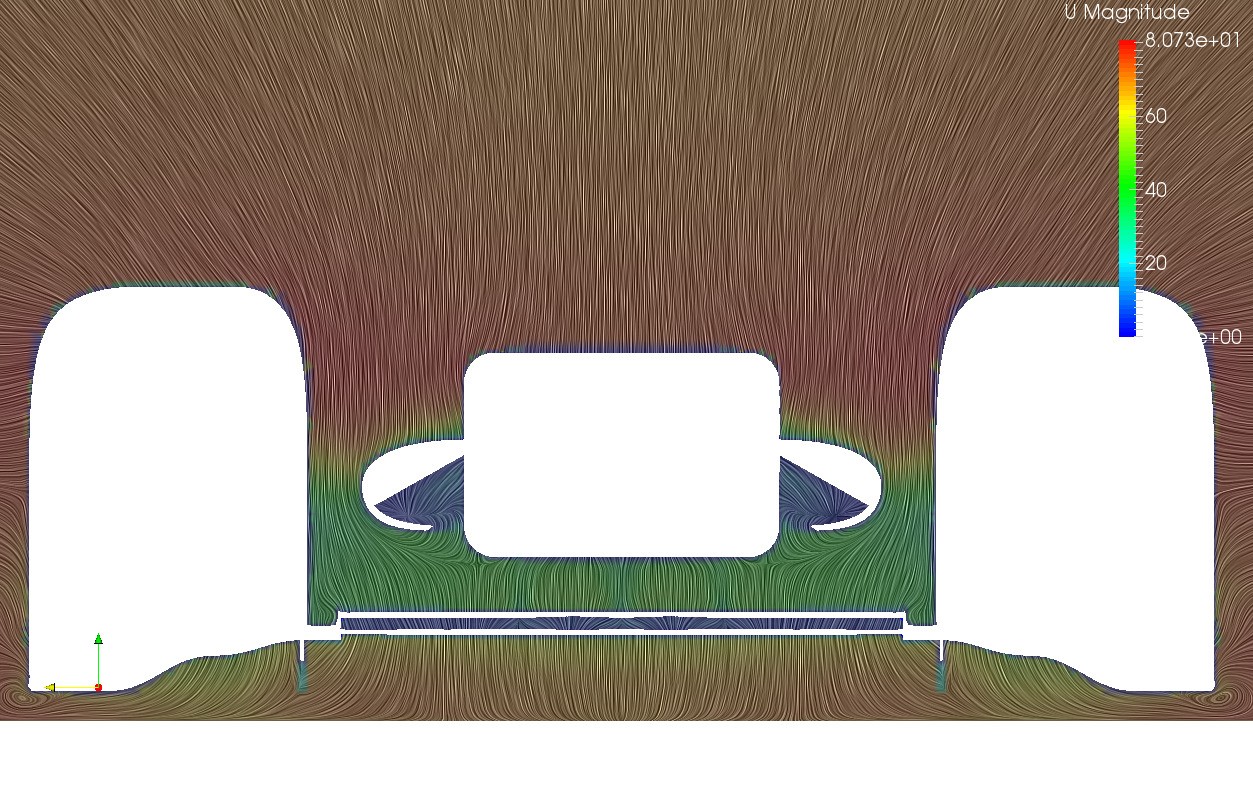
x = -0.1m
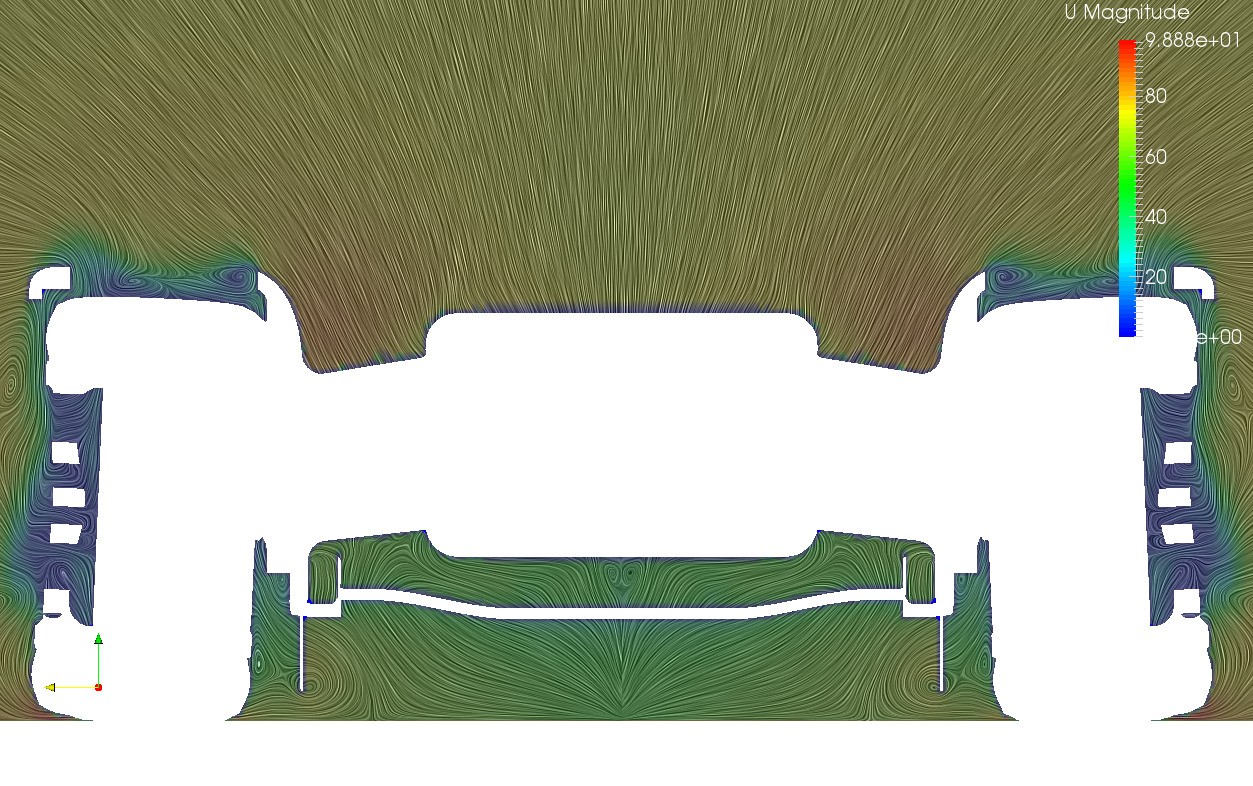
x = 0.3m
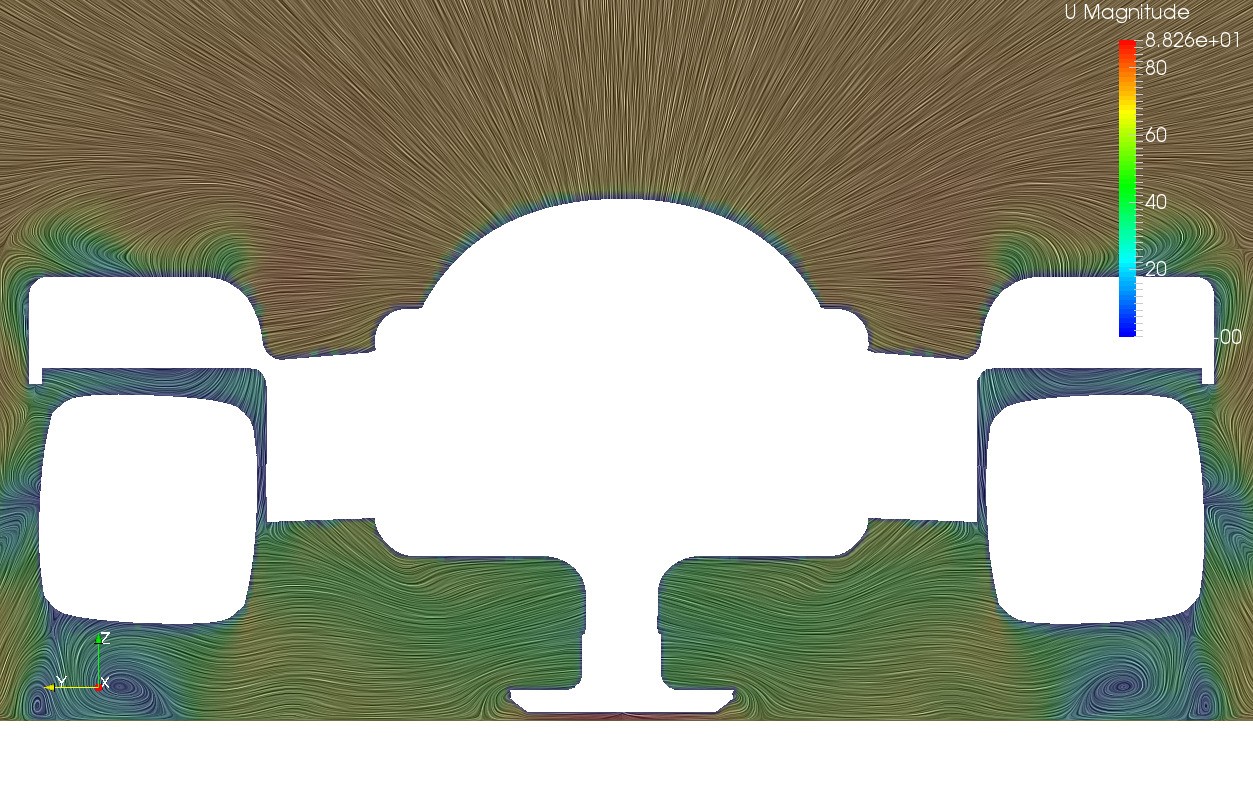
x = 0.5m
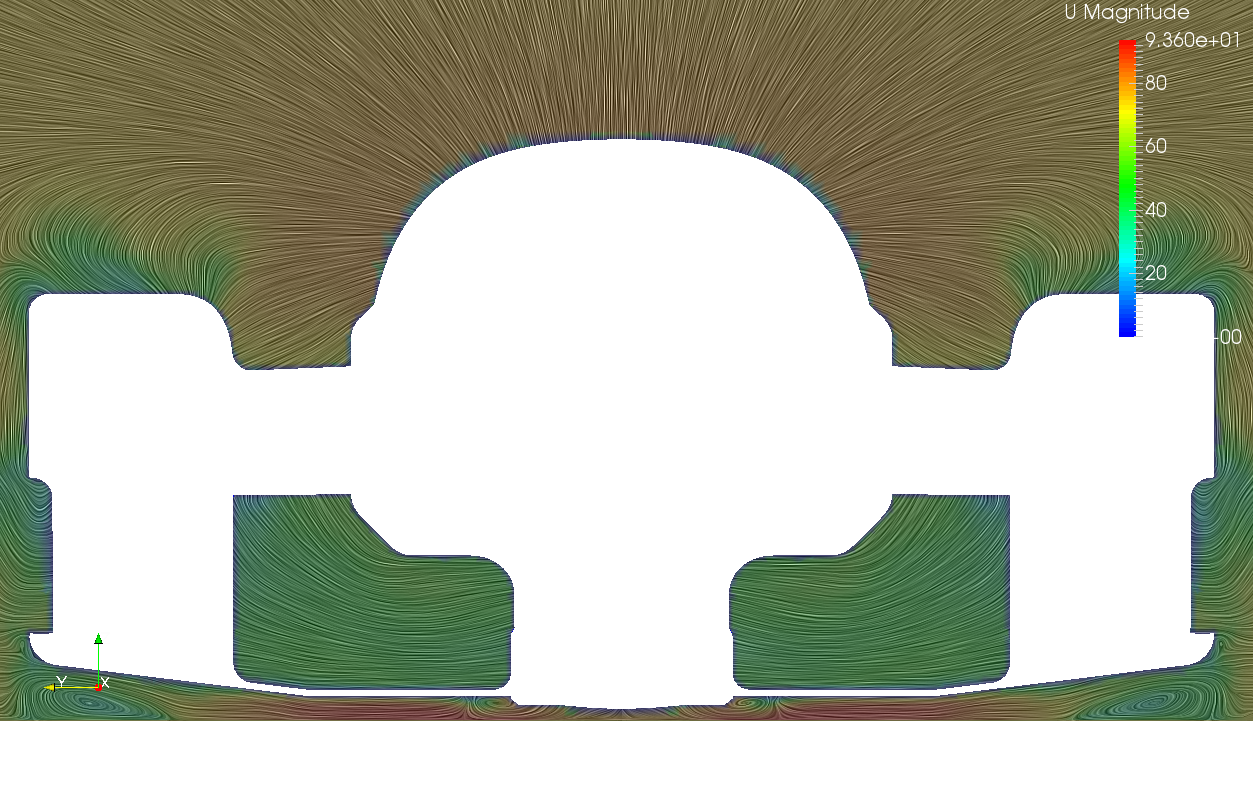
x = 0.75m
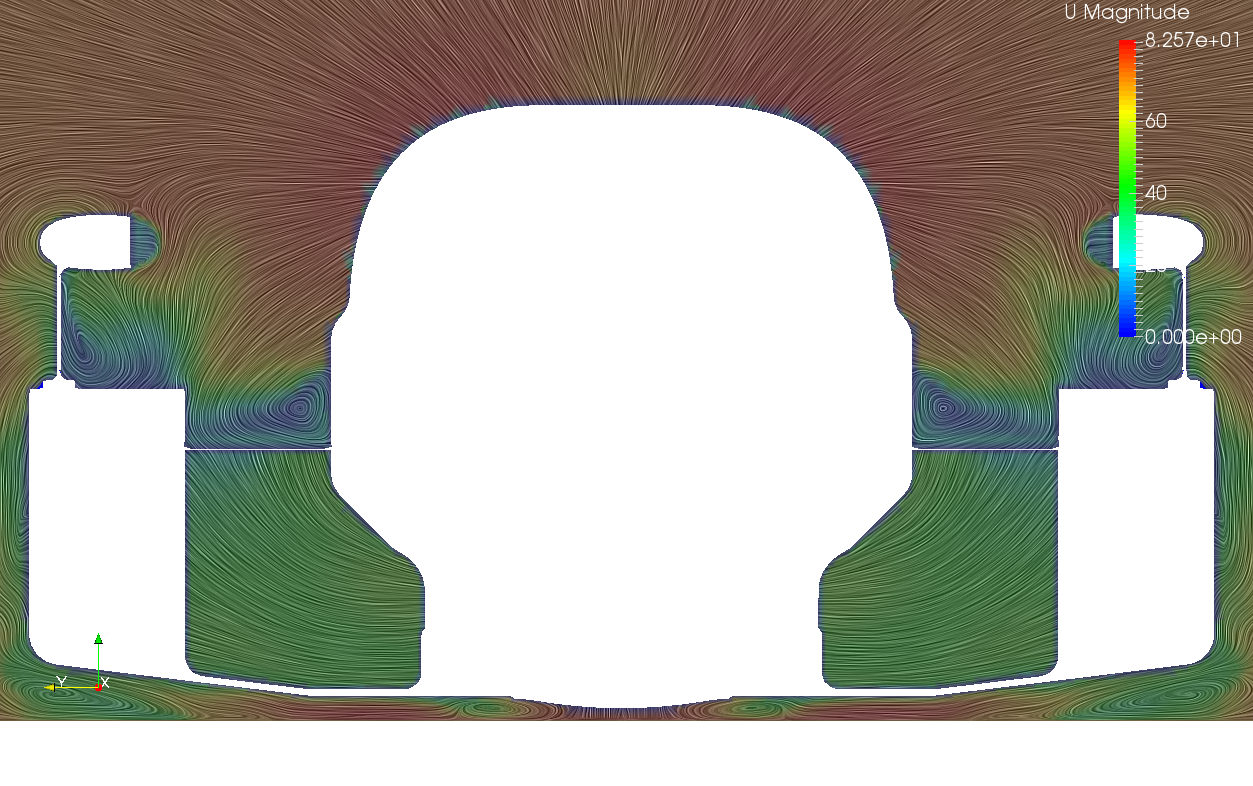
x = 2m
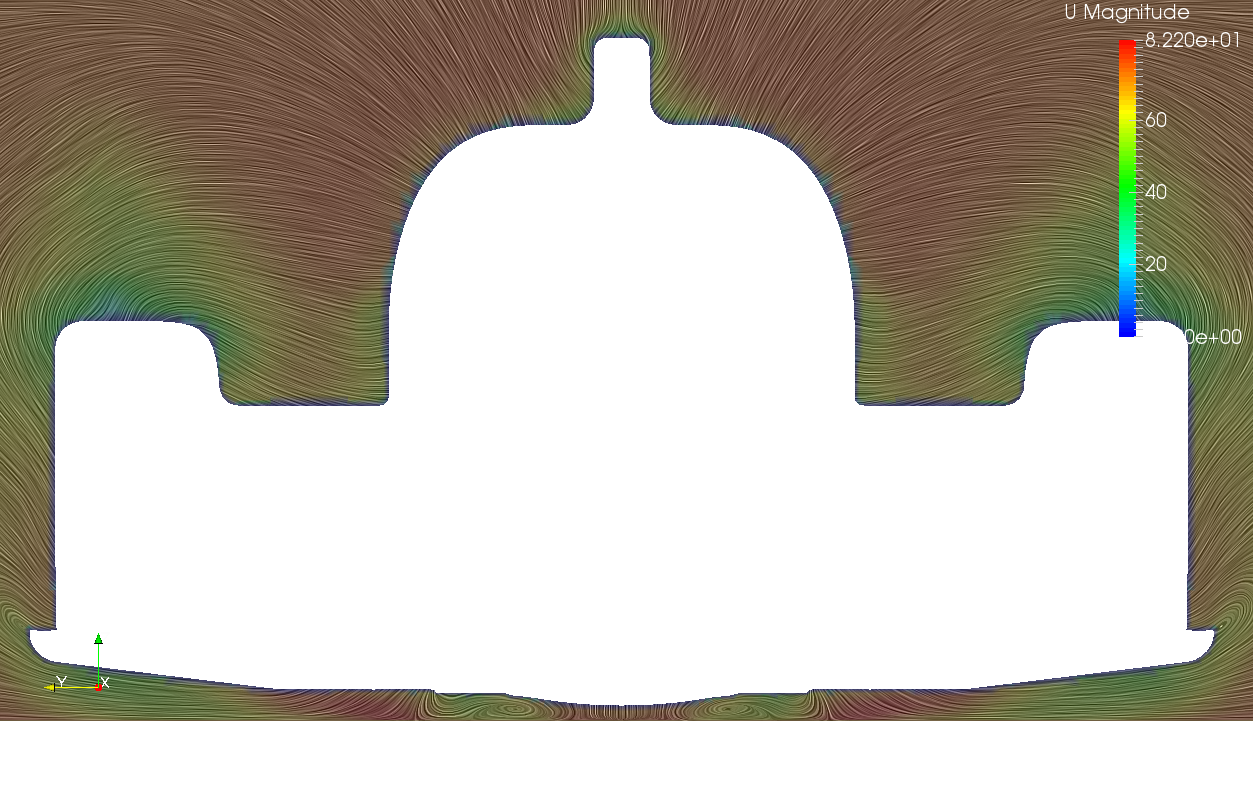
x = 2.5m
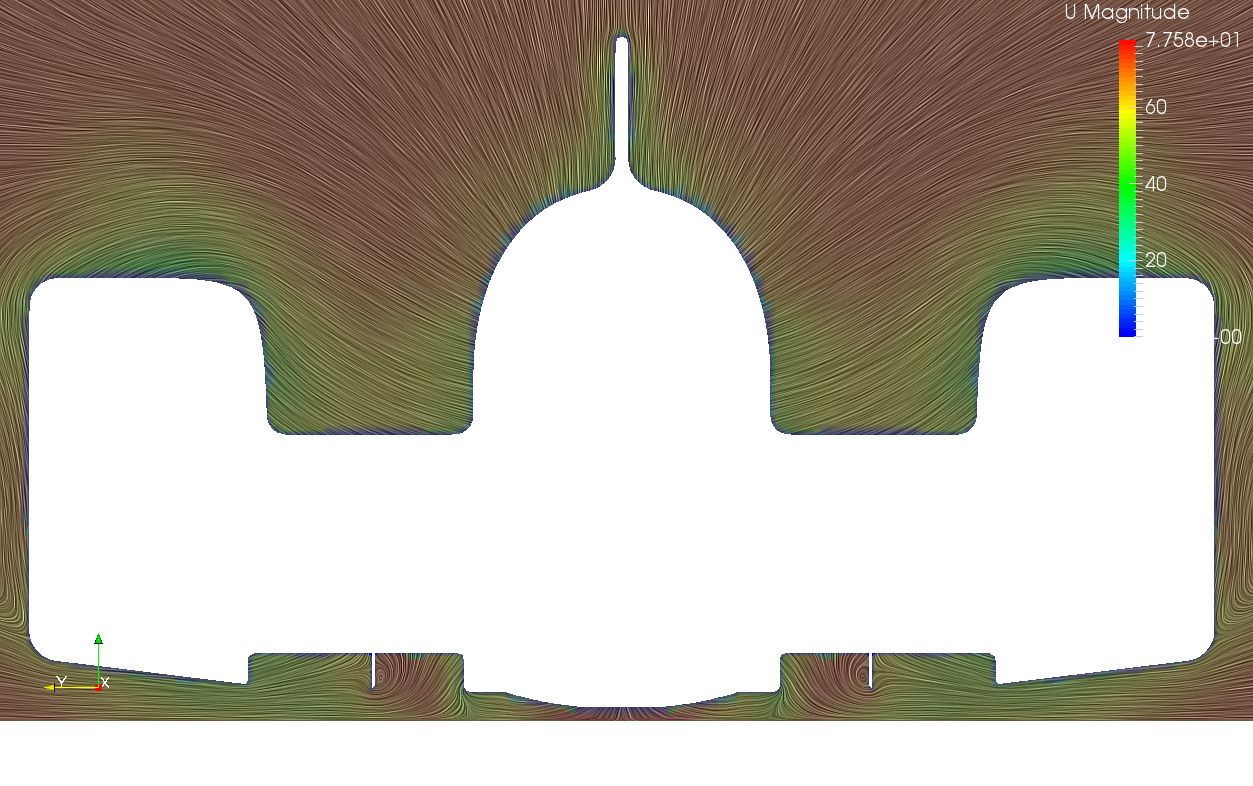
x = 3m
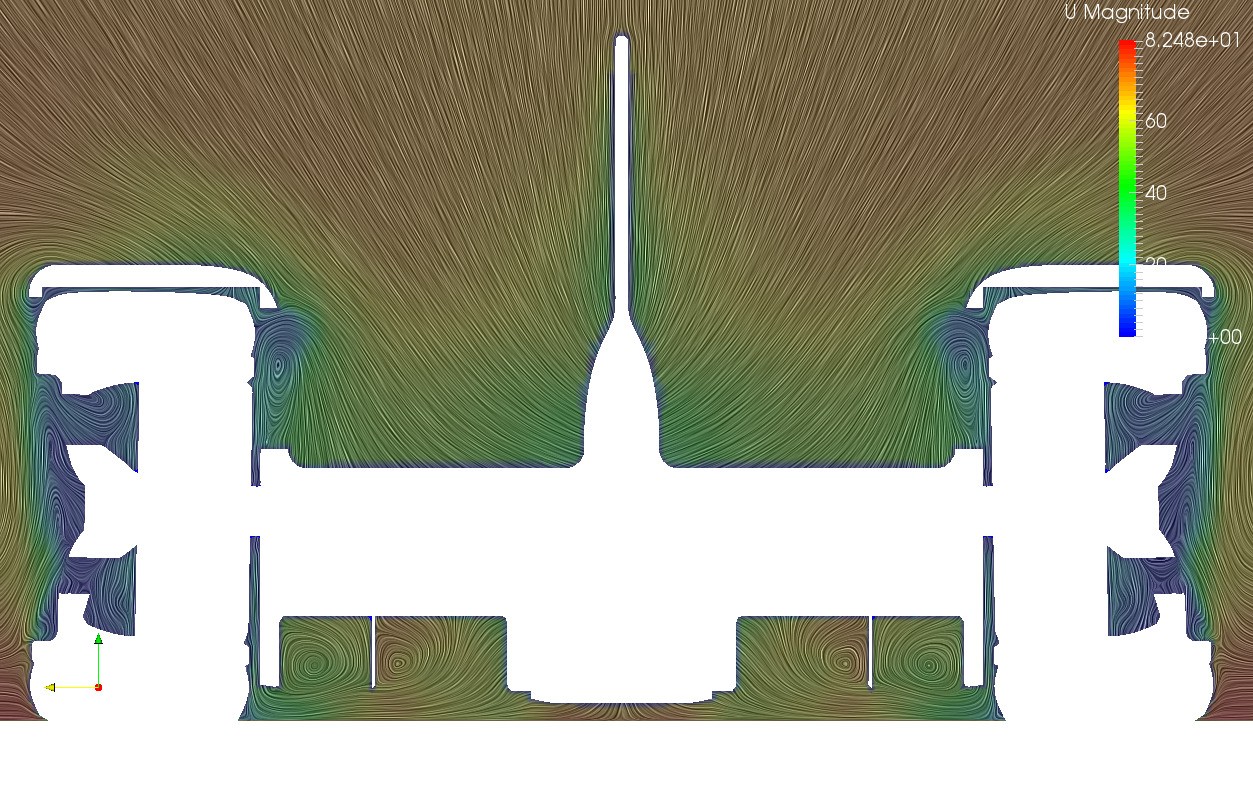
x = 3.5m
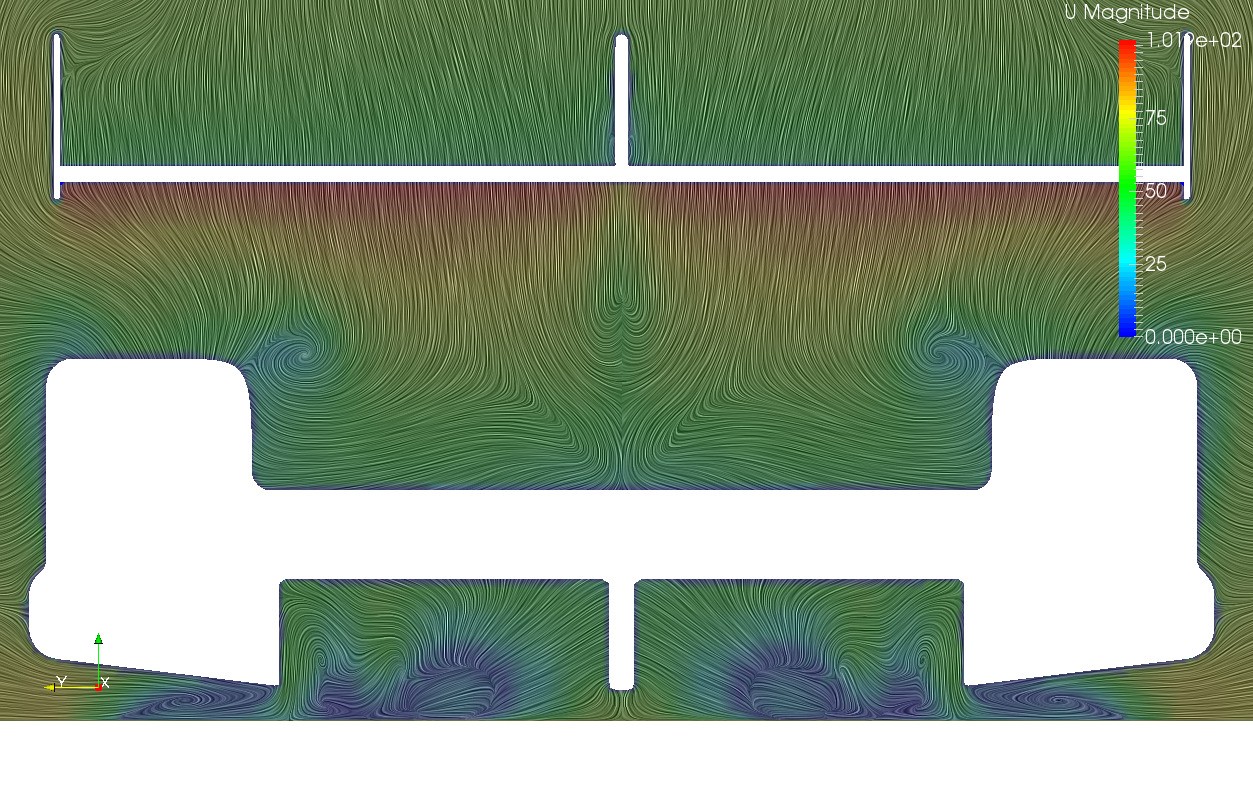
x = 4m
x = 5m

y = 0m
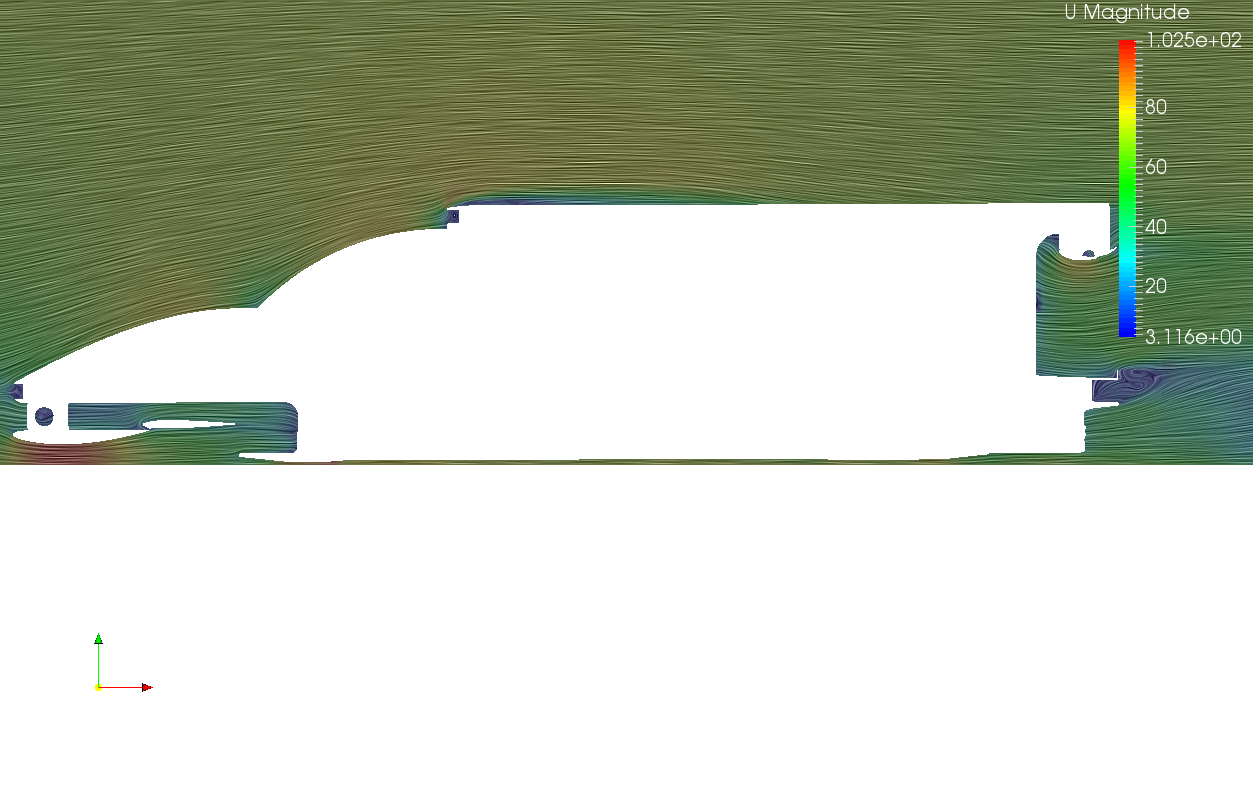
y = 0.25m
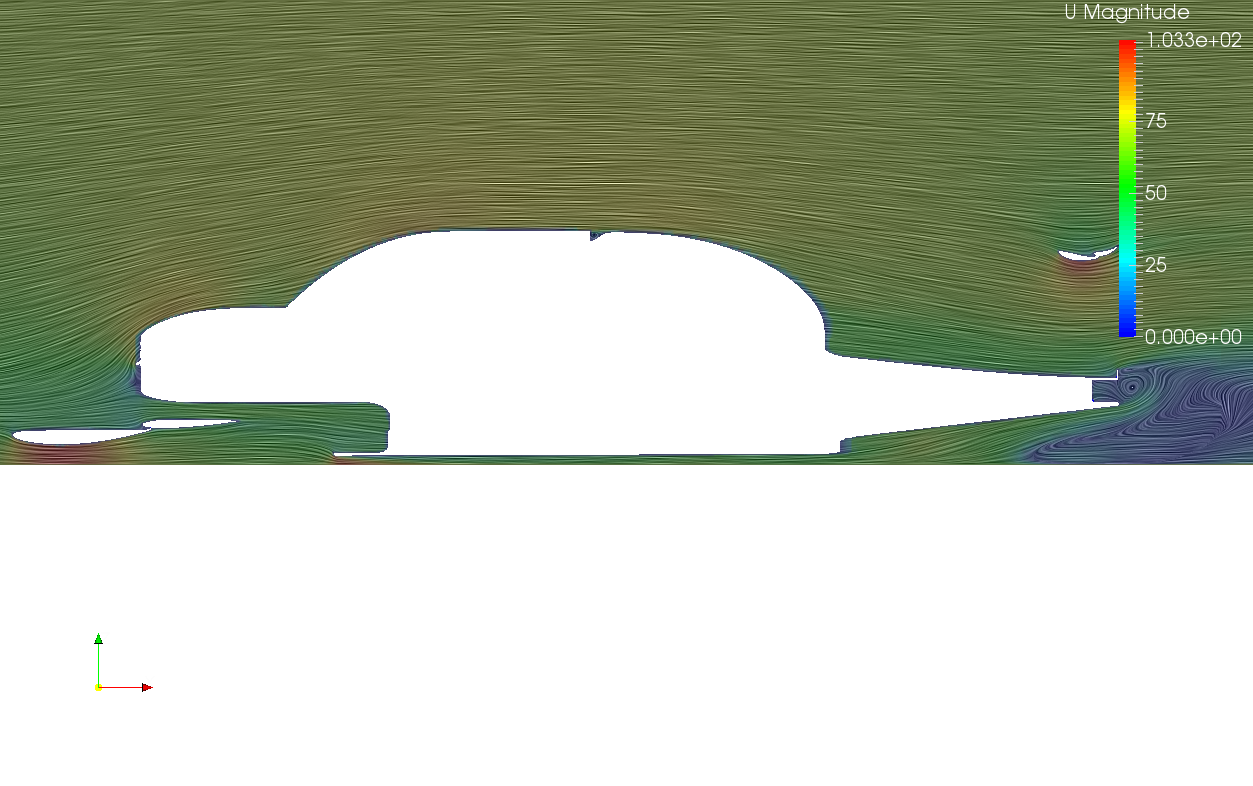
y = 0.5m
y = 0.75m