Hi @cjquijano. Thanks a lot for your effort and asnwer.
I did thought that simple Sliding Contact is not a correct contact to transfer loads in linkage joints right because I need to simulate them at 180° range, and not in 360° range. I just thought that using Physical Contact would drastically increase computation time.
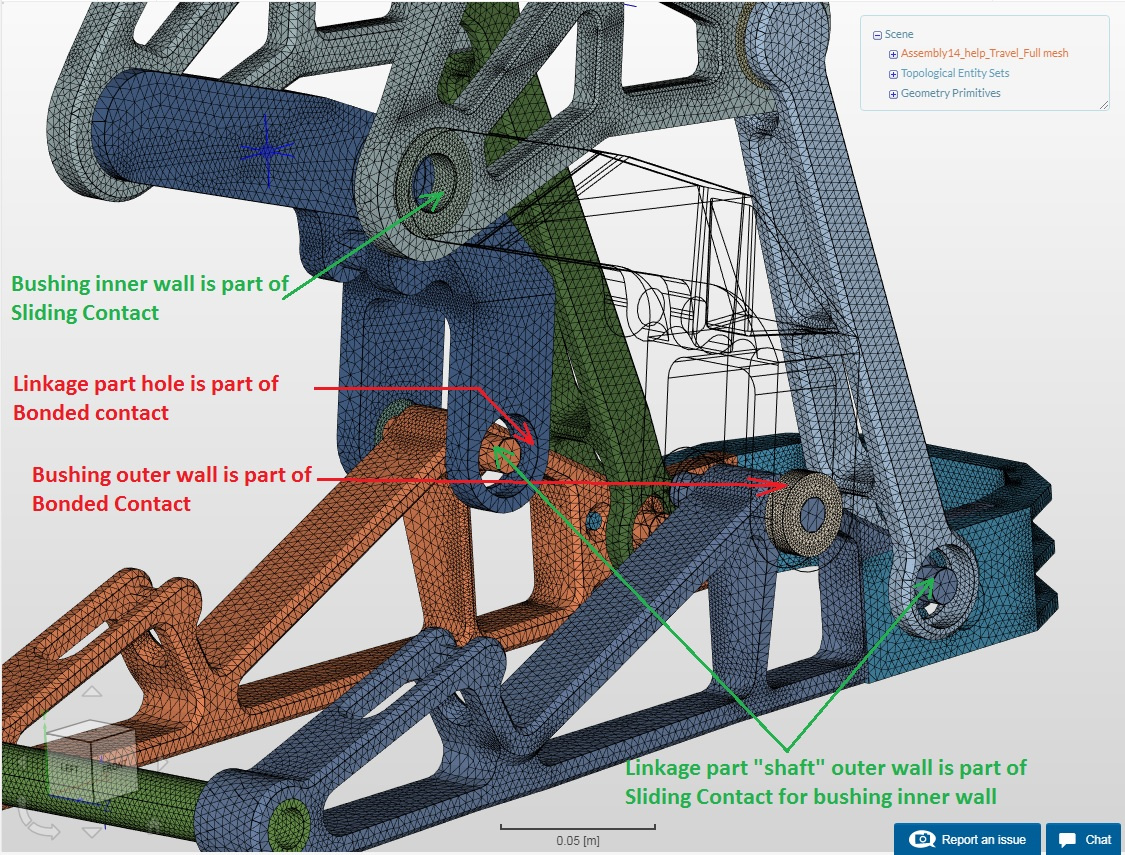
Anyway, I modified my assembly and linkage parts. I inserted cylinders into ball-bearing housings as a sort of bushings, and replaced pivot bolt holes with pivot shafts to support bushings. I noticed there is an interference between three parts due to edge chamfer but I cannot repair it now.
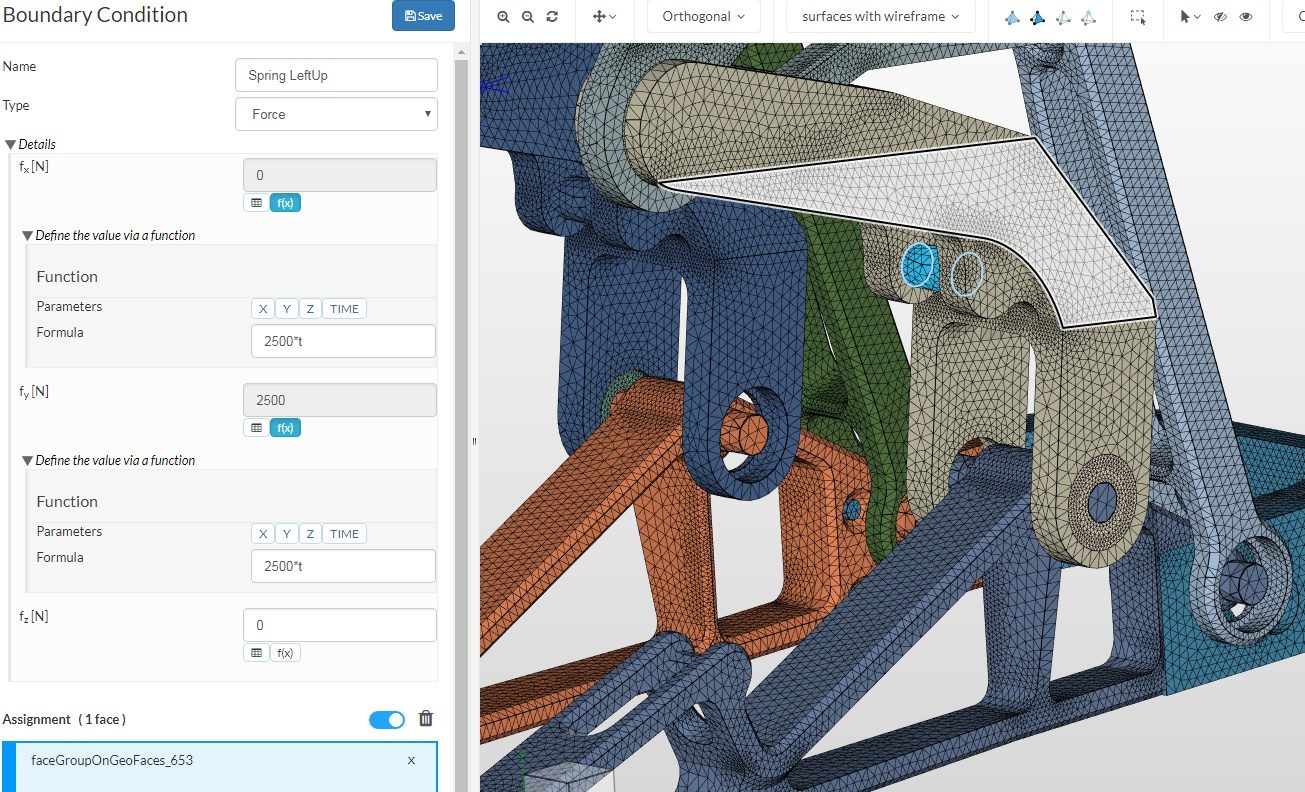
So, I setup zilion of topological entities, half a zilion of Bonded and Sliding Contacts, and with inspiration of one double wish-bone suspension project, I specified rotation using Remote Displacement boundary condition in only top-most pivots. The coil spring stiffness is mimicked by Force load. We’ll see if all of this helped, it runs 30 minutes now already.
Project: TestAssy14 help w bushings
Idea of my bushing solution.