Hi,
Some quick comments: for the first simulation that you linked the direction of rotation looks wrong. Did you mean z instead of y?
These 2 materials are pretty soft. How were the hyperelastic coefficients obtained? Are the properties correct? Have you already tried going with all linear elastic definitions to start things off?
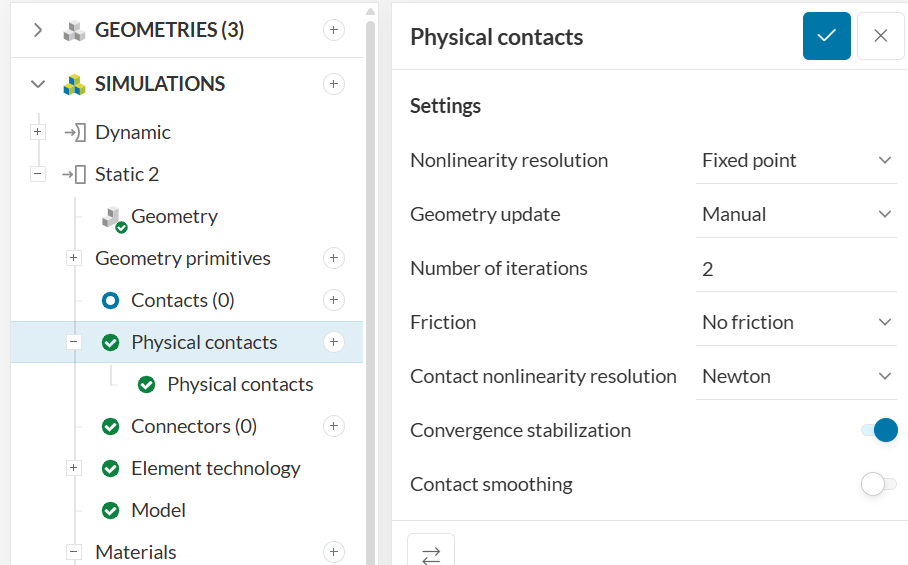
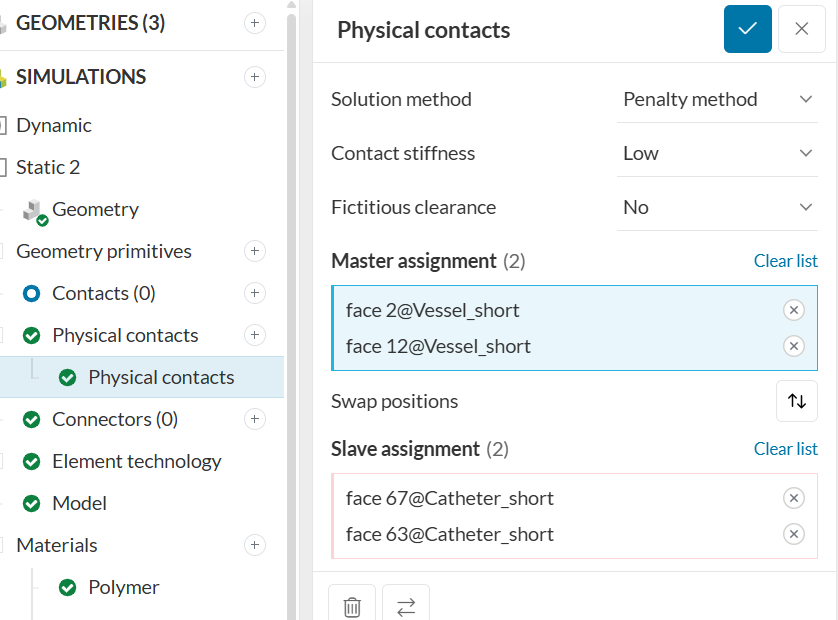
For the physical contact global setting, I’d suggest initially going with a more robust setting and then building from there. Something like this:
Just to ensure that there are no issues with rigid body motion, have you already tried a rotating motion BC instead of remote displacement? This is just a test to rule out unexpected effects with rigid body motion.