Hi Everyone,
I am currently trying to simulate how a medical catheter behaves in a simple vessel (cylinder). Despite my best efforts, I cannot seem to successfully generate contact between the catheter and the vessel. I am using a static non-linear sim with the aim being to extract the angle of twist at the end of the catheter after rotation is applied at the proximal end. I have tried:
- successful test runs with the catheter only, successful with a Mooney Rivlin model and the proximal end and distal end constrained in varying ways, diverges as soon as I add in the vessel volume
- re-meshing with coarse (>300k nodes) and fine mesh (90k nodes), it made no difference
- I have tried penalty contact, AL method and fictious clearance
- I have tried displacing the catheter to lie within 0.01mm of the vessel wall
- I remade the geometry so the catheter (total diameter 2.5mm) was 0.09mm away from the vessel wall (internal diameter 6mm)
My catheter distal end is currently unconstrained and I am only applying 45 degrees of rotation over 1s to validate the sim before continuing. I am using a parasolid model.
I am starting to really struggle, if there is anyone who could provide a solution I would really appreciate it!
Mark
Hi @marpenn2, thanks for posting. Please share a project URL so we can take a closer look
Cheers
Igor
Hi,
Some quick comments: for the first simulation that you linked the direction of rotation looks wrong. Did you mean z instead of y?
These 2 materials are pretty soft. How were the hyperelastic coefficients obtained? Are the properties correct? Have you already tried going with all linear elastic definitions to start things off?
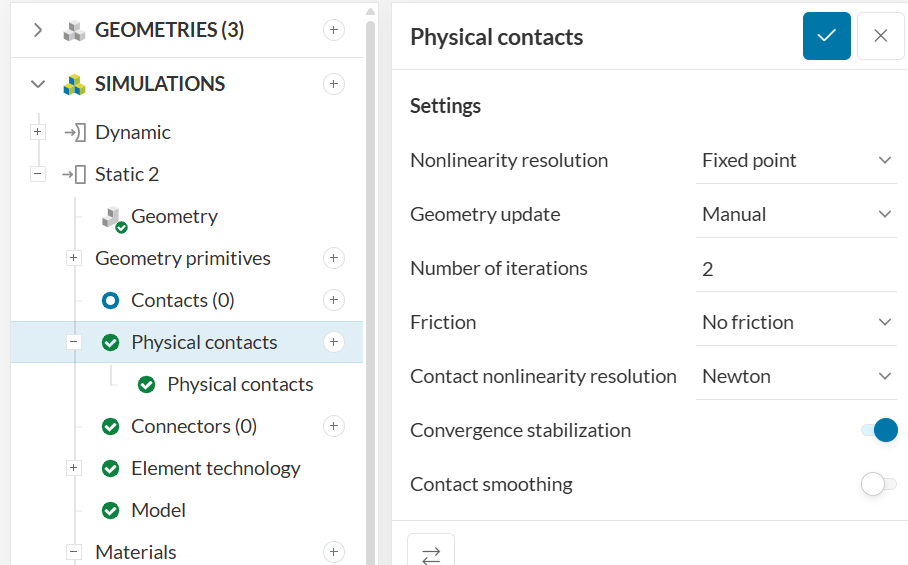
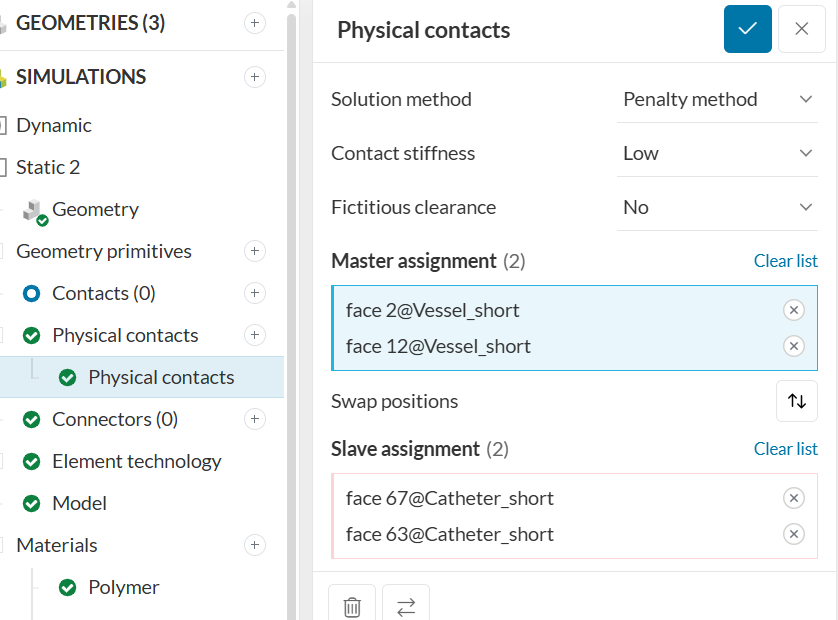
For the physical contact global setting, I’d suggest initially going with a more robust setting and then building from there. Something like this:
Just to ensure that there are no issues with rigid body motion, have you already tried a rotating motion BC instead of remote displacement? This is just a test to rule out unexpected effects with rigid body motion.
Hi Ricardo, apologies for the delay in my reply.
Thank you for your tips. The hyperelastic coefficients were originally obtained from experimental studies looking at polymer catheters and blood vessels. I initially tried these and every sim failed, so softened the material to try and determine if this was the cause.
I have now tried moving to linear elastic definitions for both the polyer and the vessel. The vessel unfortunately, is quite soft by definition, particularly relative to the catheter. You were right about the axis of rotation.
I adjusted all the other parameters as per your suggestions including changing the BC to rotating motion.
The issue I then had was very, very small timesteps during the simulation. It took >3 core hours to achieve 1% of the sim. I then tested different max and min timesteps which resulted in failure.
Any advice would be appreciated.
Thank you!