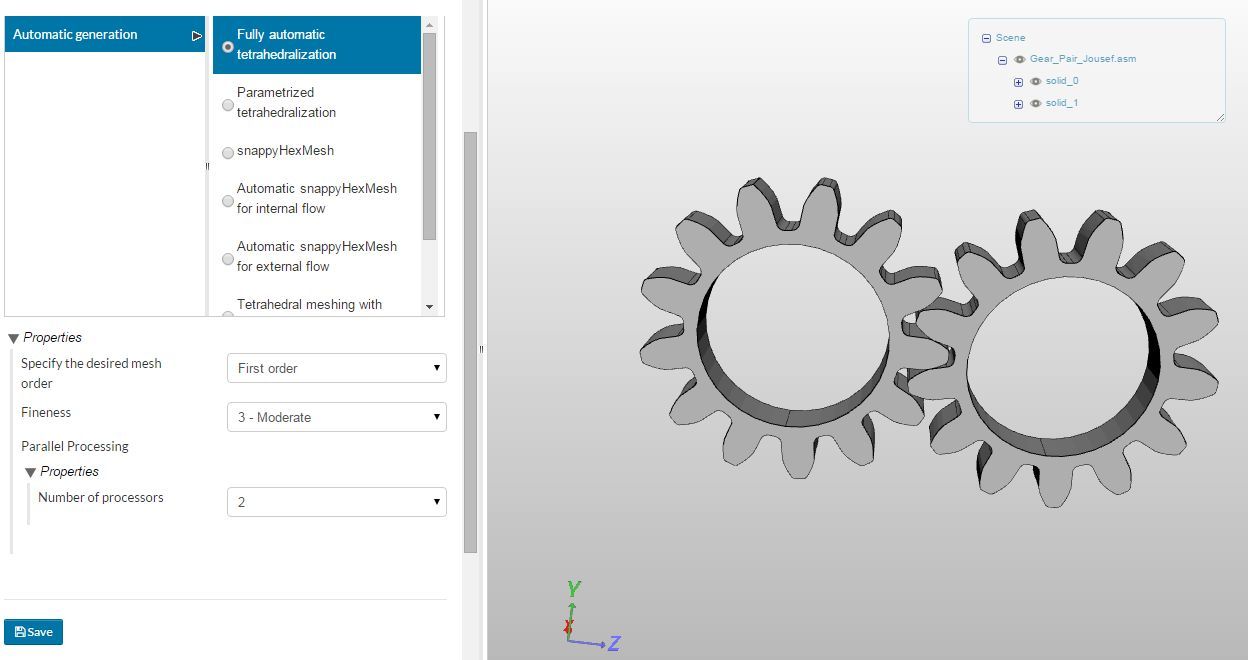
I wanted to do a simulation of a gear pair but already failed at the meshing part.
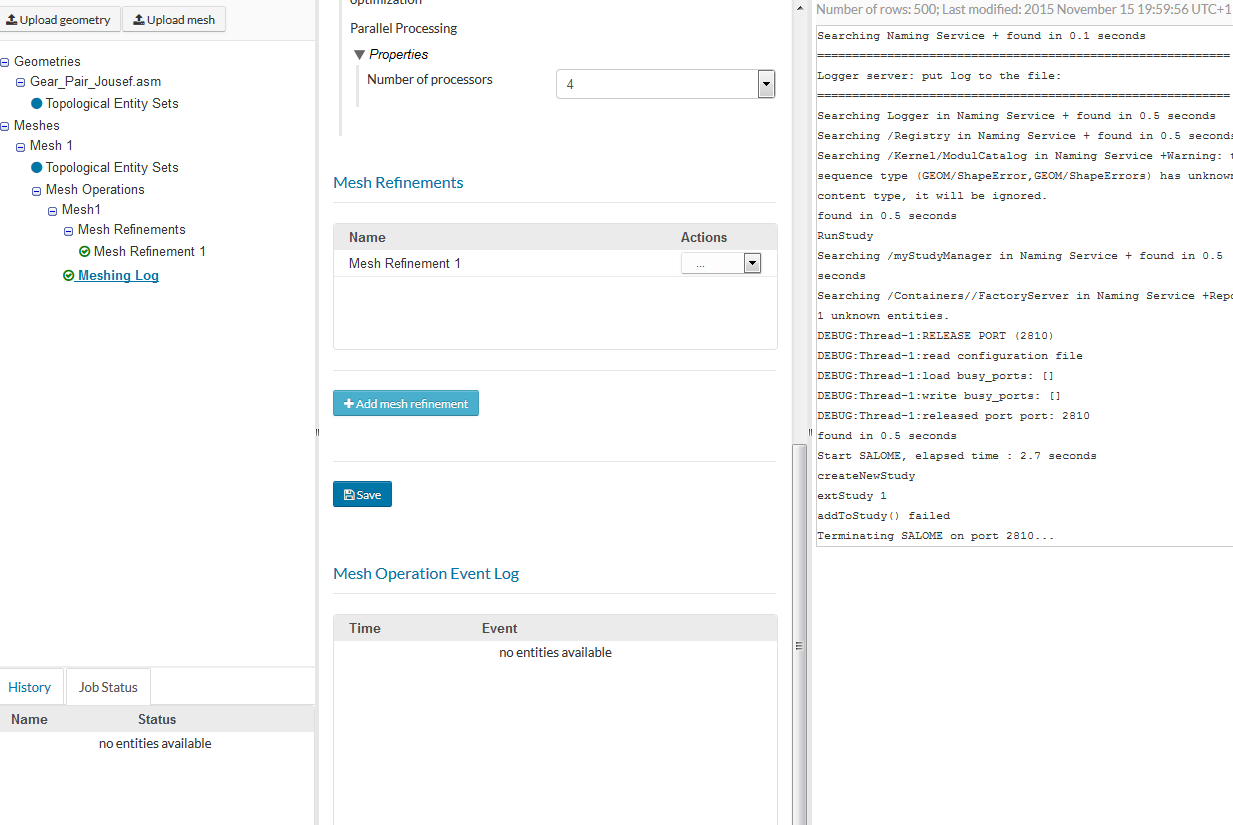
The log says:
Searching Naming Service + found in 0.1 seconds
===========================================================
Logger server: put log to the file:
===========================================================
Searching Logger in Naming Service ++++++ found in 3.0 seconds
Searching /Registry in Naming Service + found in 0.5 seconds
Searching /Kernel/ModulCatalog in Naming Service +Warning: this sequence type (GEOM/ShapeError,GEOM/ShapeErrors) has unknown content type, it will be ignored.
found in 0.5 seconds
RunStudy
Searching /myStudyManager in Naming Service +++++ found in 2.5 seconds
Searching /Containers//FactoryServer in Naming Service +Report : 1 unknown entities.
DEBUG:Thread-1:RELEASE PORT (2810)
DEBUG:Thread-1:read configuration file
DEBUG:Thread-1:load busy_ports: []
DEBUG:Thread-1:write busy_ports: []
DEBUG:Thread-1:released port port: 2810
found in 0.5 seconds
Start SALOME, elapsed time : 10.9 seconds
createNewStudy
extStudy 1
addToStudy() failed
Terminating SALOME on port 2810...
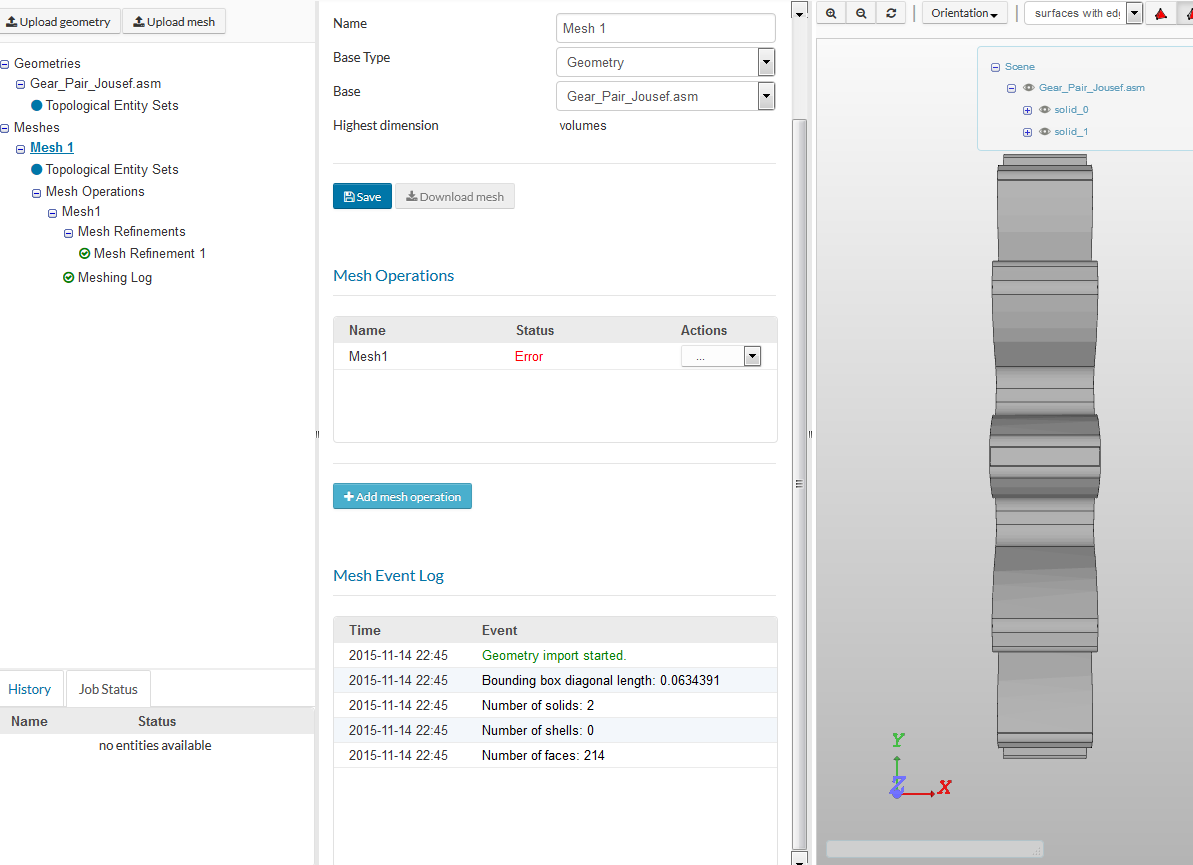
I had a close look at the problem. It is obviously related to some Meta-data that comes with your step model, storing some presentation information (like visibility) and I think also material data, that can not be imported properly by our mesher. We are looking into this right now in order to fix that for future cases. Can you tell me which software has been used to export that model.
In the meantime should I share you a project with the cleaned-up geometry or send you the file, so that you can proceed with your work?
Hey Jousef, that’s good news, as we use SpaceClaim a lot and normally this problem does not occur ;-). We will test with SpaceClaim, but it looks like we already have a stable fix.
managed to set my project so far.
I did a mistake I guess. I want that typical “pitting” shear stress under the surface where the contact is. Did I anything wrong concerning the master-slave-assignment?
Hi @jousefm,
generally it looks very good, well done!
Just two changes:
You have to provide the correct center for the rotation and the moment application. I changed the two gears such that I apply the rot+moment on the one centered at 0.
I changed the remote displacement behavior to “rigid” to not have the gear deforming since its pretty thin.
And some general remarks:
The remote boundary conditions are generally only valid for small rotations, for big rotations the may suffer from unphysical expansion effects.
The mesh in your contact region is very coarse, you need a very fine surface mesh to represent the contact stresses correctly
Beware the time stepping. You ramped the moment with 20*t, but your time stepping reaches only 0.01, so your final moment will be 0.2 Nm.
that’s a good approach, always start with a coarse model first!
Concerning the remote force and large rotations, it’s currently not possible.
If you have a prescribed rotation+displacement, use the “rotating motion” constraint, this works then like the remote constraint with undeformable option, but also allows large rotations and you can also move the center of rotation with time.