Thanks again @rszoeke.
Maybe you’d have a suggestion on how to apply perturbing load to the protrubing legs.
I understand that the momentum along longitudional axis applied in the middle of the leg would be in the effect of buckling, but don’t know how to set it up in SimScale
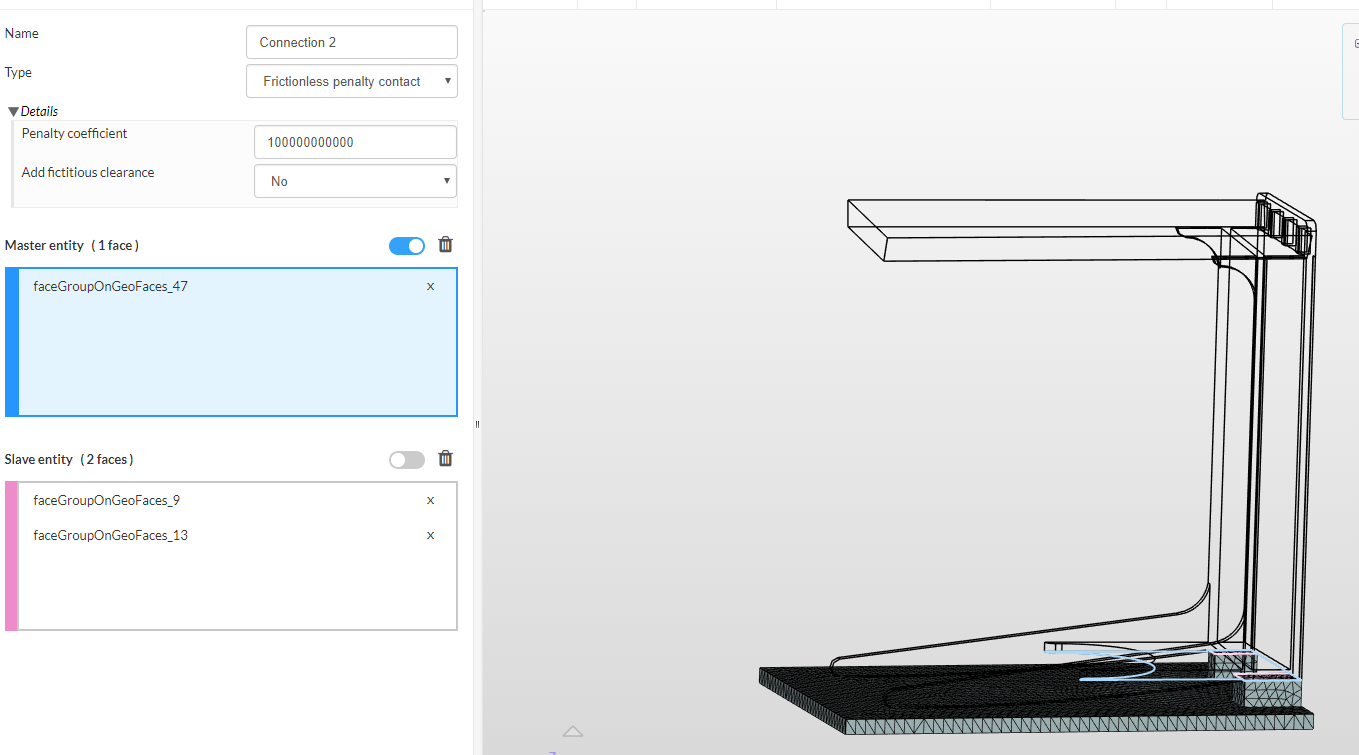
Please be aware that one face can not be a slave face of different contact definitions simultaneously. The same goes for slave faces of Contacts. On top of that make sure to start another iteration with a second order mesh. I have successfully been able to run a simulation with a bonded contact definition without any error.
P.S.: Shared the project with you. Name of the simulation: with_support. Name of the run: RUN NEW - FIRST ORDER.
Update: Successfully finished the second order mesh simulation as well! Feel free to have a look at it and copy the project.
Hi @jousefm, thanks for looking into it!
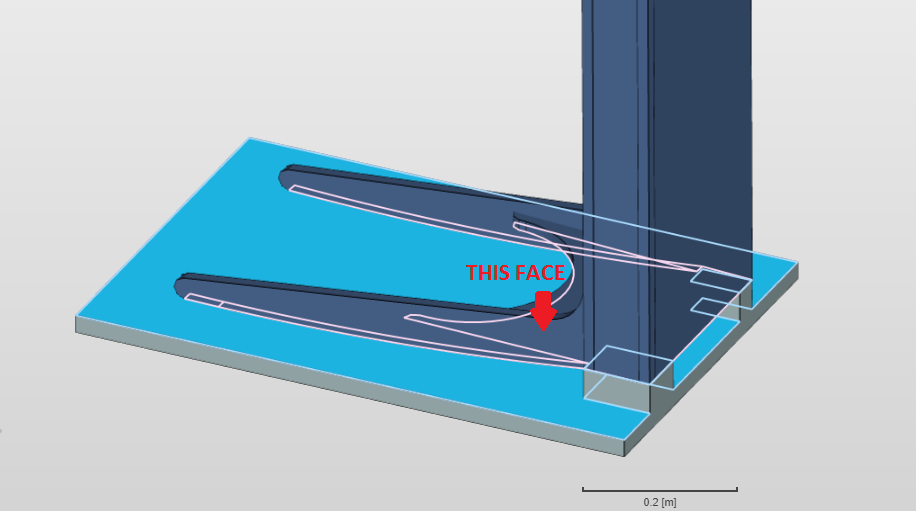
I need physical contact – protruding legs to the floor should be moving the touch point under load.
And even if I have one physical contact – the simulation run fails.
I have made a first successful run which you can find under with_support and the name Final Run. @ahmedhussain18,@rszoeke, feel free to add your comments.
Furthermore, If you want to consider the floor as rigid, try constraining the whole volume. I also think that you have probably taken half of the table, if that is the case then try to fix the symmetric side of the table in x axis. Also please note in that case you have to apply half of the required force.
just remove all the faces and then from selection options select ‘Assign volume’ and then select the volume. It will then put that volume under your selection box
Yes of course if its not glued together it is better to define physical contact. But be careful with elastic support. A high value can give different results. Also I think friction can help here a bit otherwise table can easily slide on the floor if right elastic support is defined.
You don’t need 32 cores for such a small mesh. Try using Elastic support value of 500 and use MUMPS as solver. Under the settings of MUMPS make sure ‘Stop if Singular’ is set to false. Under ‘Simulation Control’ select ‘Number of computing cores’ to 8 and ‘Number of cores used for the computation’ to 2. This will make your simulation to finish in just 4 minutes
@ahmedhussain18, I’ve tried to replicate your runs, having exactly same contacts, numerics settings. Just added 2 additional forces to test uneven load.
You can have a look at Run 10, it’s been running for 23 minutes now.
No luck, Run 10 failed “The solution matrix is singular. This may be caused by an unconstrained rigid body motion, a physical contact definition with open gap in a nonlinear static analysis or incoherent material parameters”