I have a problem with modeling two mating gear in dynamic analysis in which the two mating gears are interfering although I set the physical contact properly
project link
thanks in advance
I have a problem with modeling two mating gear in dynamic analysis in which the two mating gears are interfering although I set the physical contact properly
thanks in advance
Hi @khalidElserfy1 ,
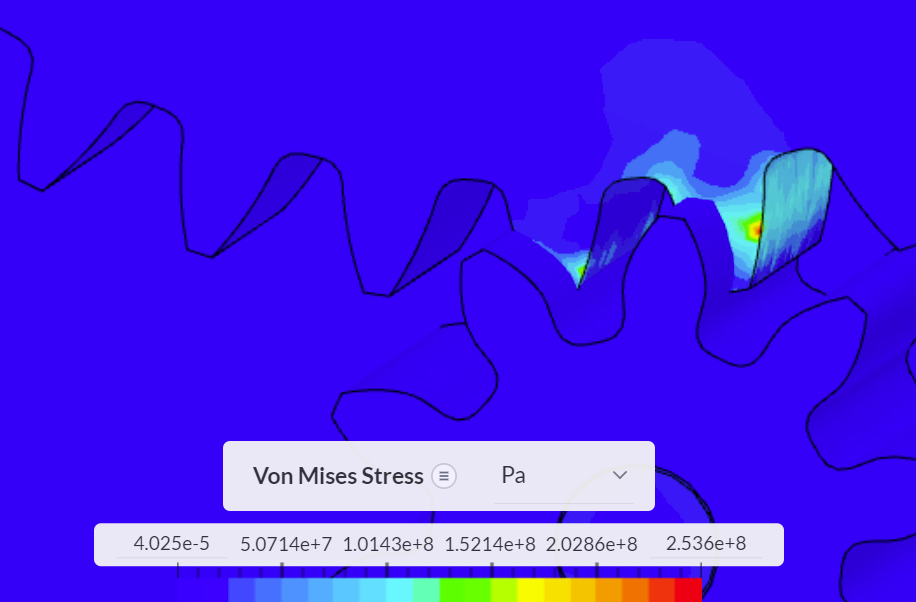
it looks like the contact is active but the penalty coefficient is too low compared to the contact forces, so you get some significant contact penetration.
Try to rerun with a contact penalty parameter of 10x what you have now and check if the contact penetration would get low enough. If not, increase again.
Keep in mind that there is a trade-off between lowering the contact penetration and robustness, so if the penalty parameter gets too big, you’ll face convergence issues.
Best,
Richard