Dear SimScalers,
in this weeks spotlight we will have a look at a drop test of a drone by @ahmedhussain18 .
Drone or an unmanned aircraft formally known as Unmanned Aerial Vehicles (UAV) is essentially a flying robot which can either be remotely controlled or fly autonomously. The most common remotely controlled drone among them are quad copters. In this project, drop test of a quad copter drone was simulated. The drone was dropped with a velocity of 10 m/s (36 km/h) on a rigid plate.
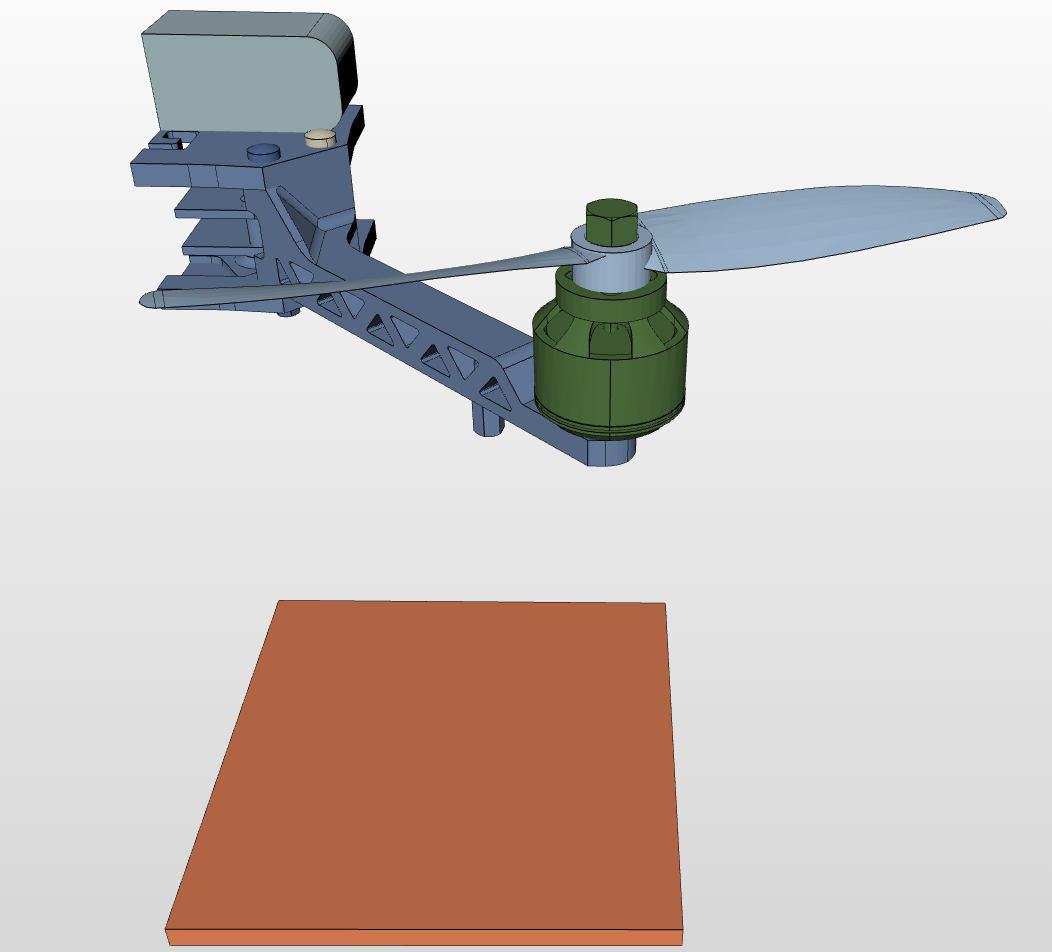
Geometry:
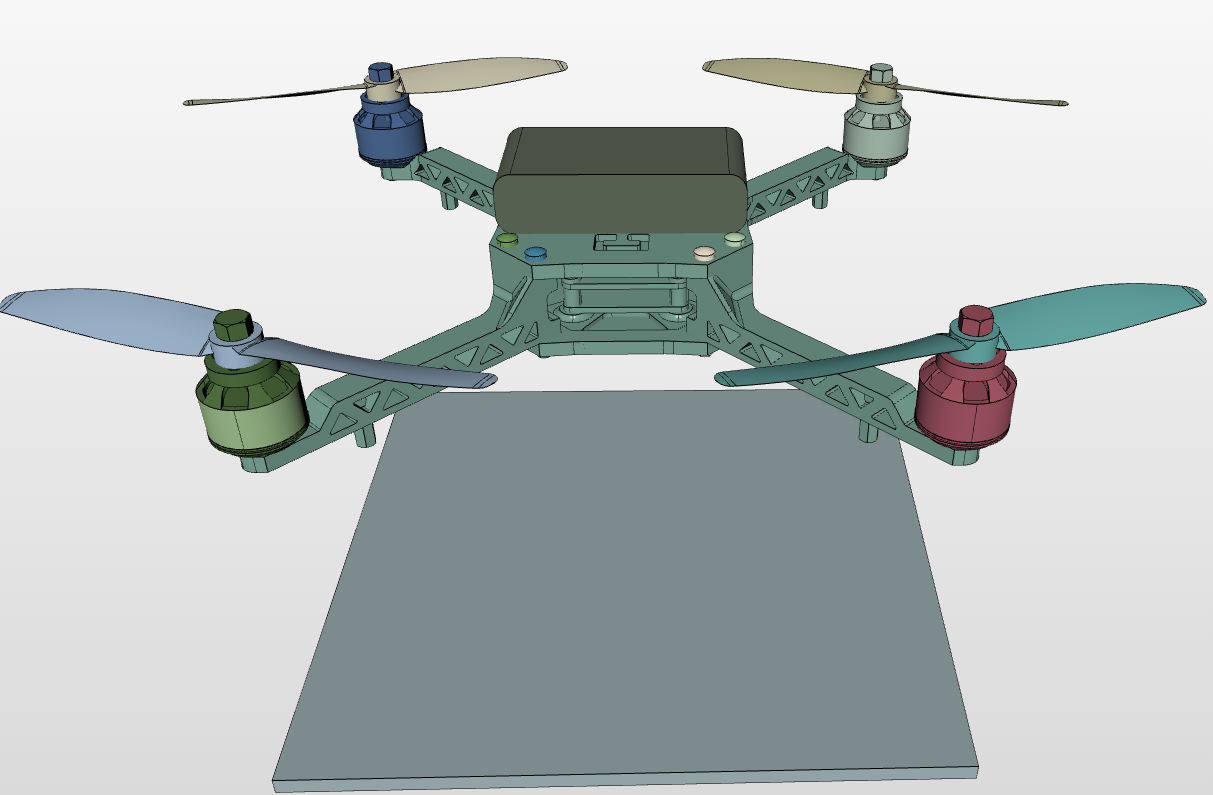
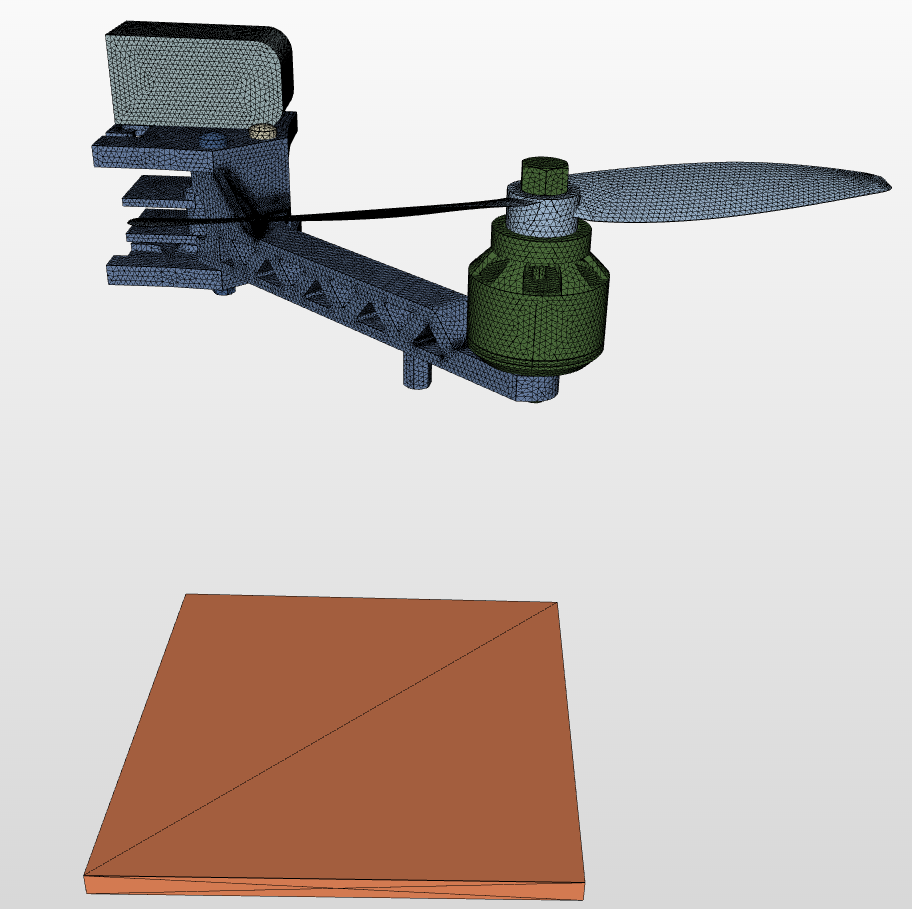
Due to symmetry of the model, only quarter of the model was taken in to consideration for the analysis. Doing this helped in reducing the mesh size and thus computation time. The quarter model is shown in the figure below.
Mesh:
Tetrahedralization with refinements was used as mesh algorithm. Two types of mesh were made; moderate and refinement. Some of the curvatures were refined in order to capture stresses more accurately. The refined mesh is shown in the figure below.
Simulation Setup:
Dynamic analysis - advanced was used as an analysis type. Bonded contacts were defined between screws, battery, frame, motor and blade. Moreover, physical contact was defined between drone lower portion and floor and between motor gaps. Drone arm and body was considered as made from ABS Thermoplastic, screws and motor as Steel and battery as Aluminum.
Initial velocity of 10 m/s (36 km/h) was given to drone in negative y direction whereas plate was constrained in all directions making it rigid. Simulation was run for 0.015 s using a time definition via table upload in order to have manual control over timestepping between different intervals. Simulation was run on 8 cores and took around 35 min. and 67 min. to complete for moderate and refined mesh respectively.
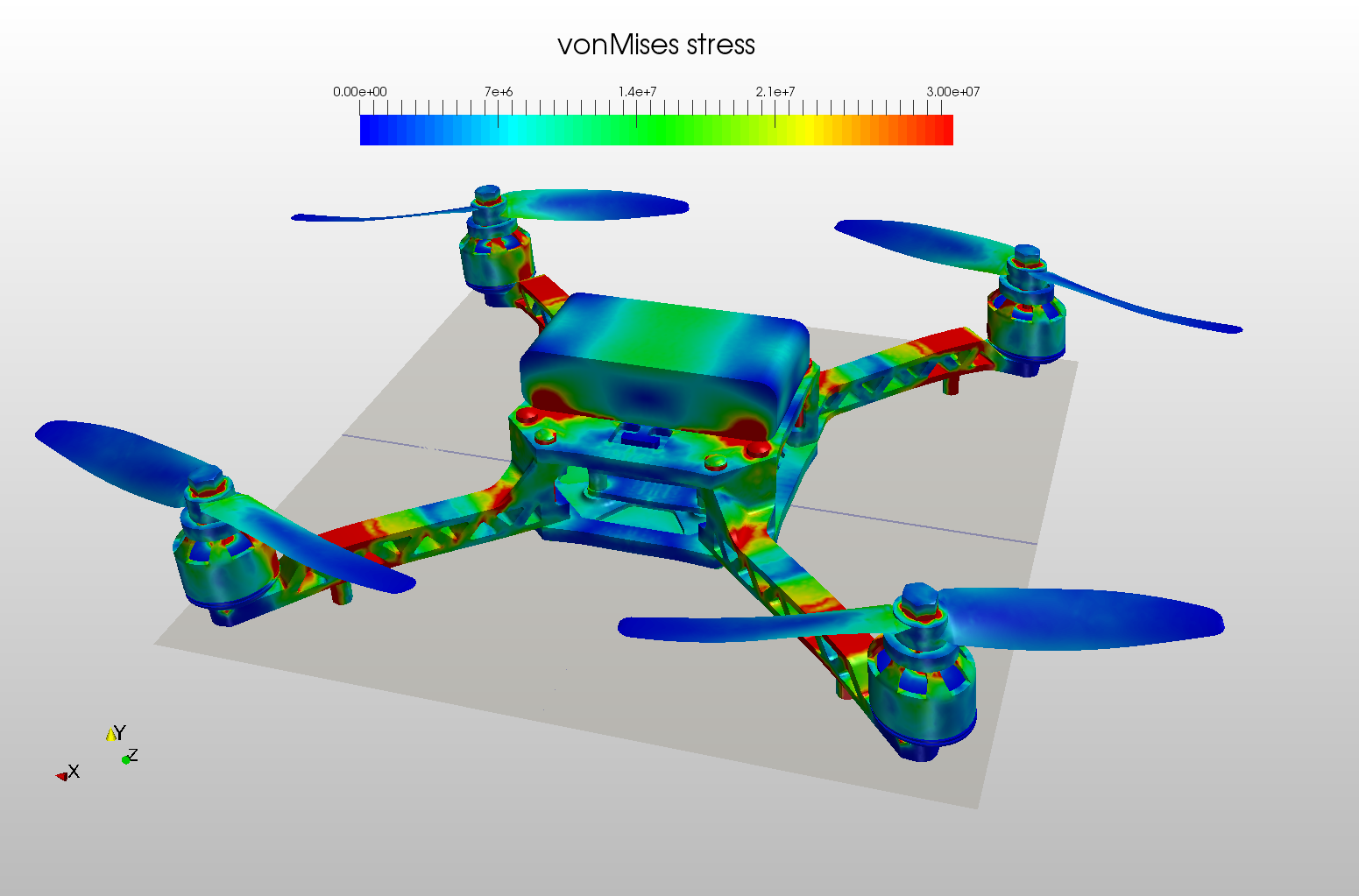
Results:
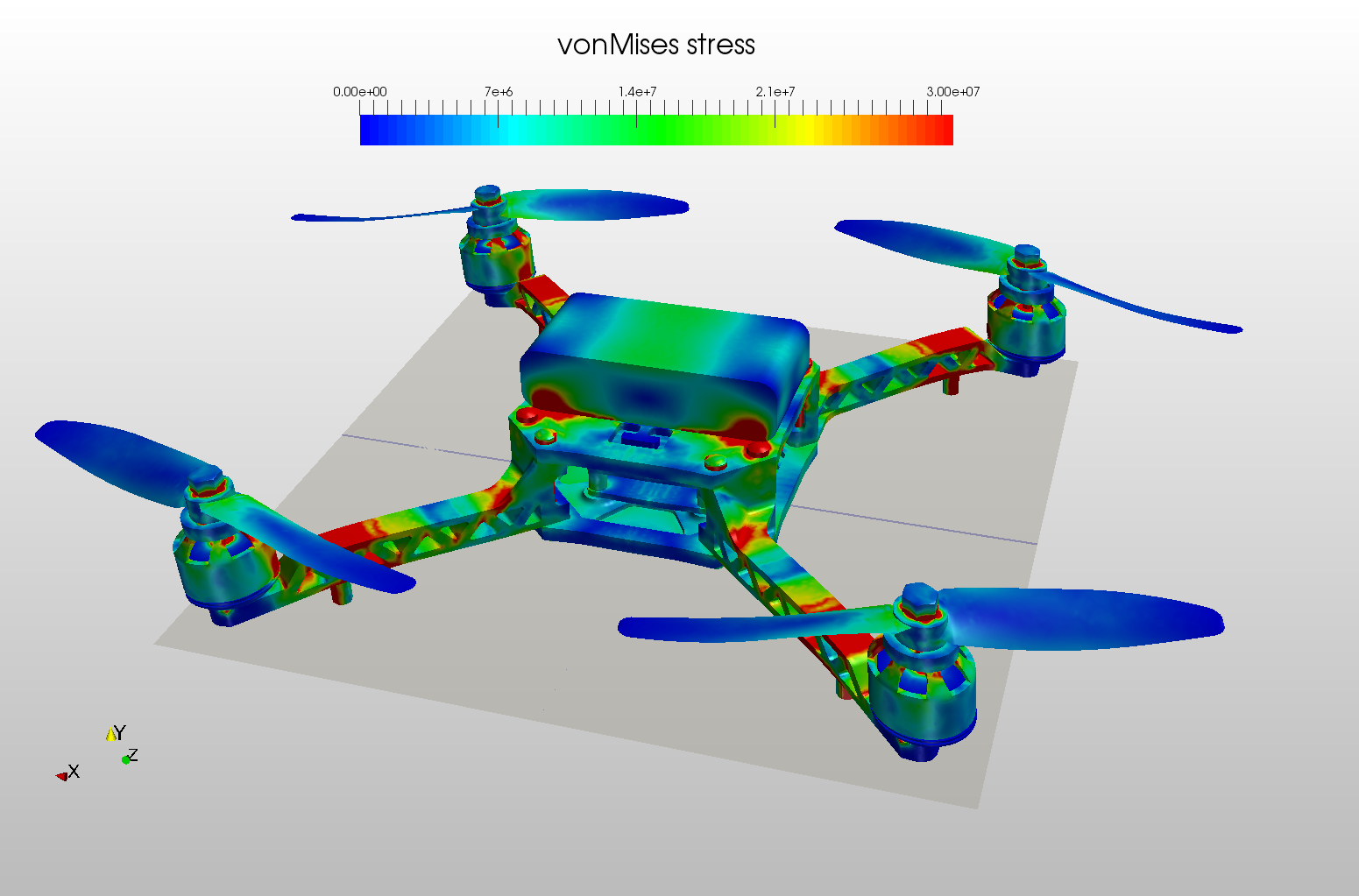
Interval: Maximum Impact
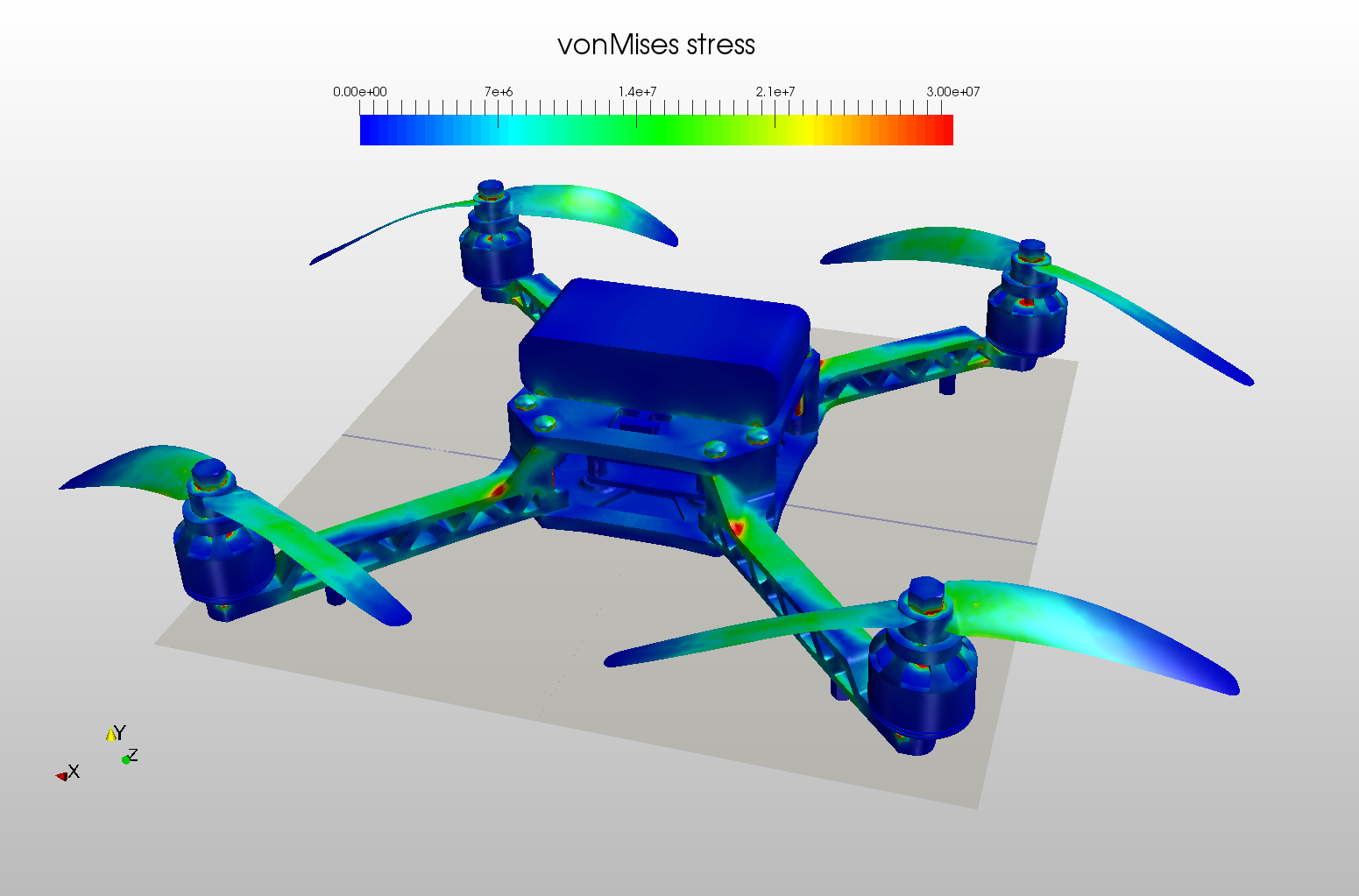
Interval: Just after the Impact
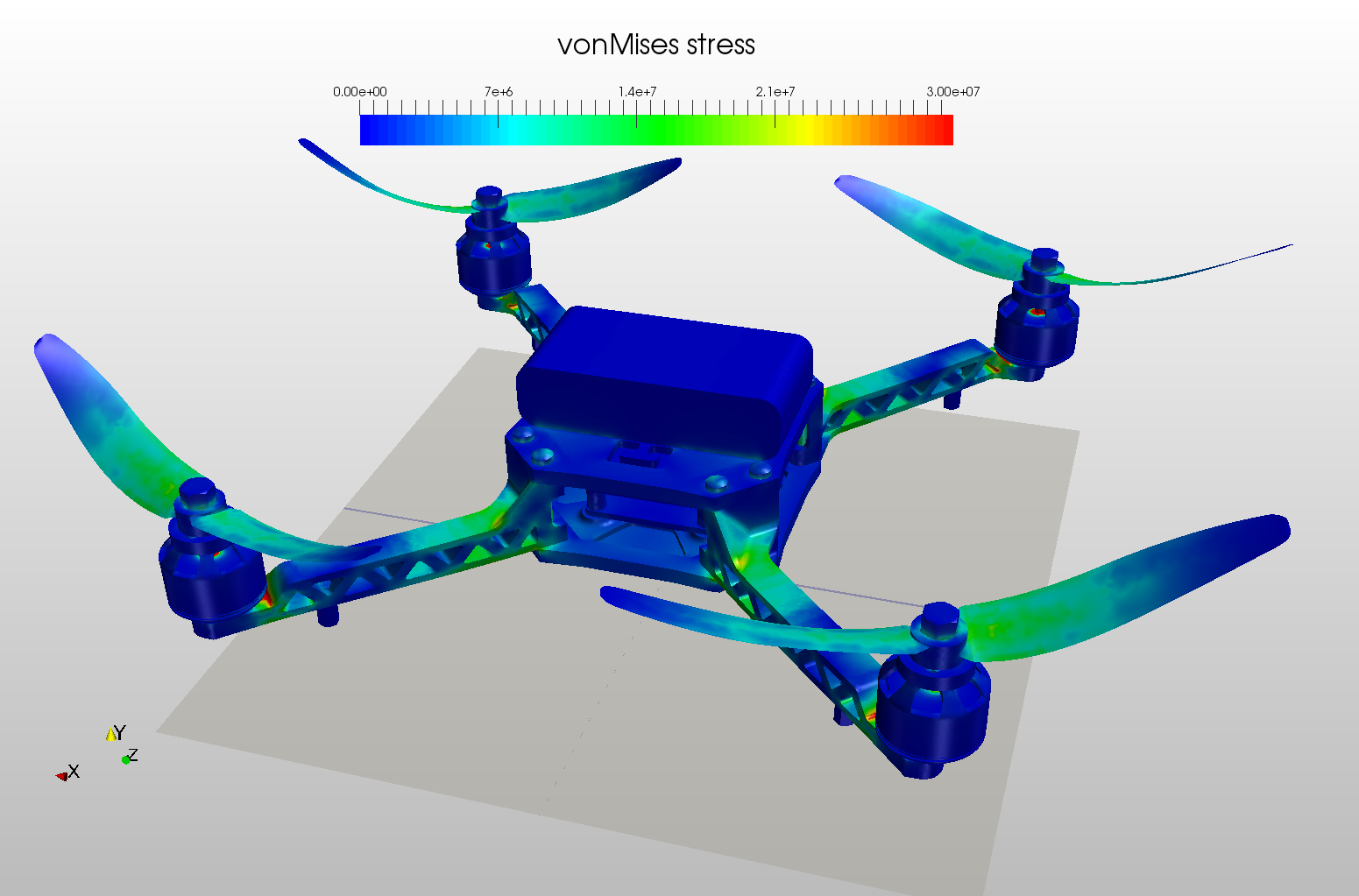
Interval: Final stage
Animation
SimScale project:
To look at the simulation setup, please have a look at the project from @ahmedhussain18 :
To copy this project into your workspace, simply follow the instruction given in the picture below.
\underline{\textbf{Visit our SimWiki by clicking on the picture}}