I created a new simulation project called 'Drop Test of a drone':
In this project drop of a drone on a rigid plate is simulated.
Original project of @rszoeke
More of my public projects can be found here.
I created a new simulation project called 'Drop Test of a drone':
In this project drop of a drone on a rigid plate is simulated.
Original project of @rszoeke
More of my public projects can be found here.
In the past decade, drones have found a variety of applications ranging from military surveillance and conducting unmanned missile strikes to capturing sports and shooting wedding videos. A drone or an unmanned aircraft, formally known as Unmanned Aerial Vehicles (UAV) is essentially a flying device, which may either be controlled remotely or fly autonomously. Among the most common remote-controlled drones are quadcopters.
These drones are often fitted with a camera and a number of sensors to receive and transmit a live data feed about its surroundings to the user. This enables the user to utilize this information for any decision-making. To ensure that the drone provides a continuous data supply, its own safety should also be a priority.
In this project, we conduct a drop test of a quadcopter drone onto a steel plate. This would give us an idea about the extent of damage the quadcopter would incur at certain conditions of an accident or crash landing. From the results, we will be able to determine the structural integrity of the drone as well as have more data to work with for making suitable design modifications.
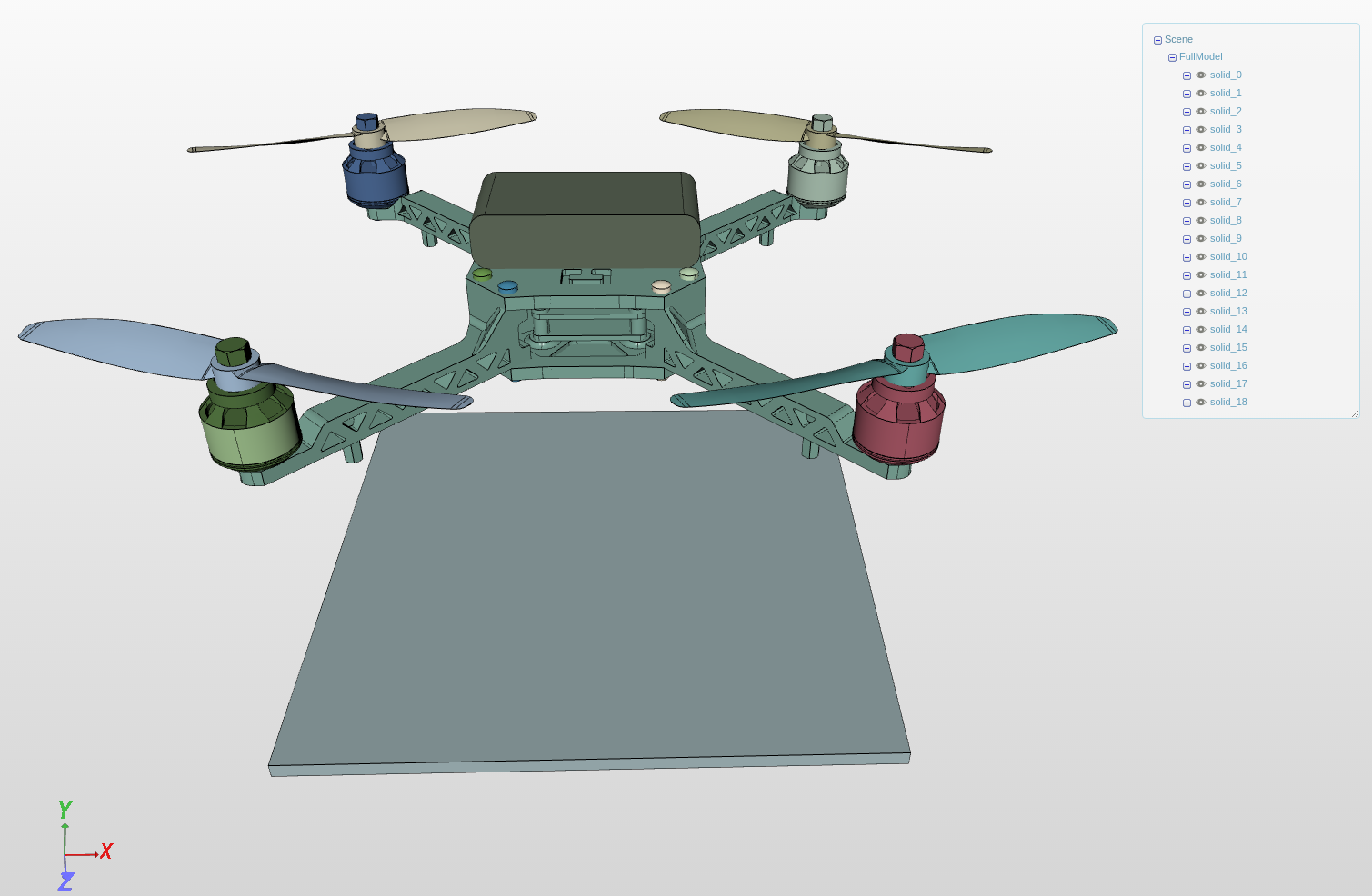
The drone is dropped with a velocity of 10 m/s (36 km/h) on a rigid plate.
The entire geometry of the quadcopter with the steel plate is shown in the figure below.
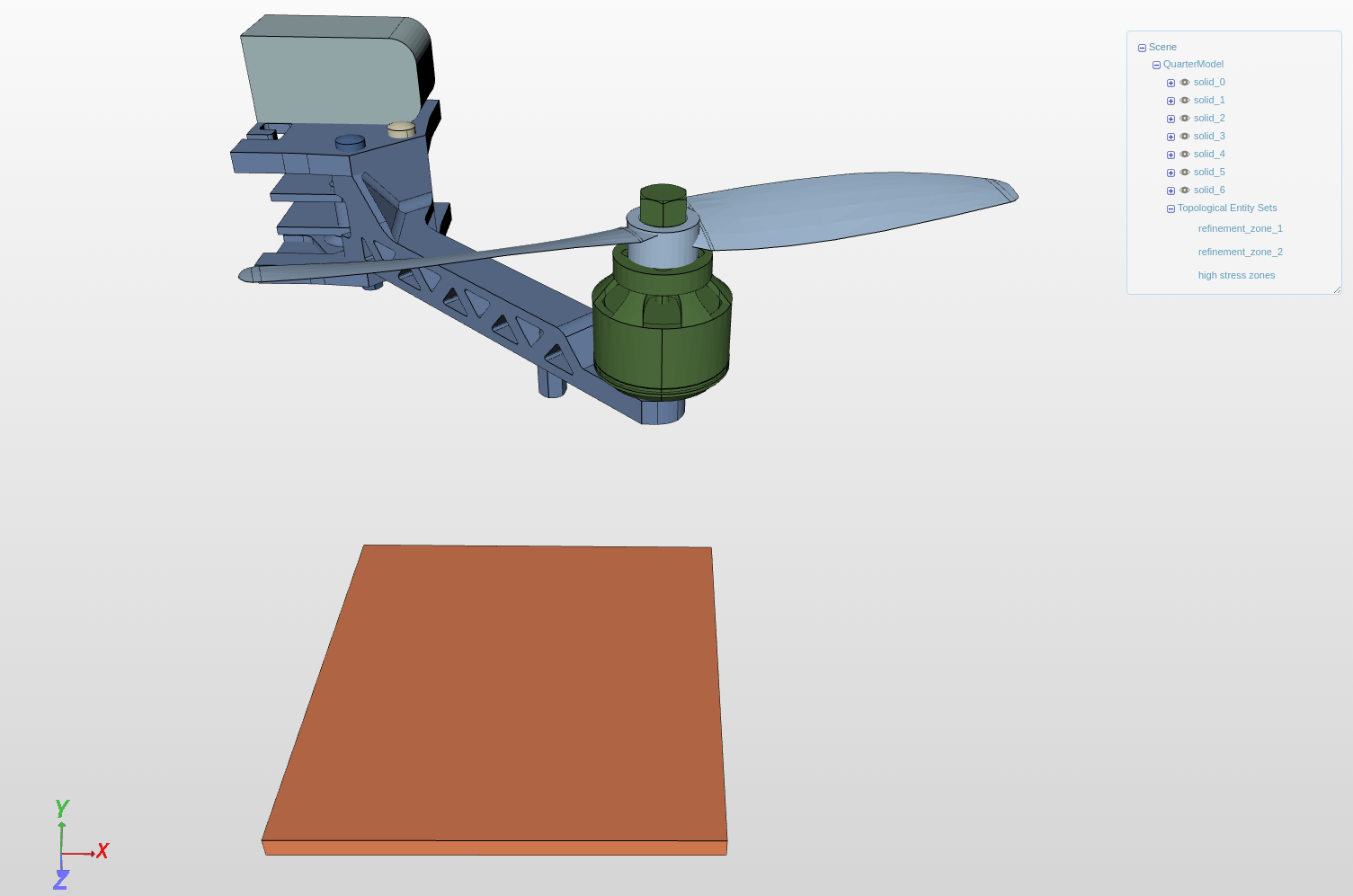
Due to the symmetry of the model, only a quarter of it was taken into consideration for the analysis. Doing this helped in reduce the mesh size and the computation time. The quarter model is shown in the figure below.
A Dynamic Analysis is used as an analysis type. Bonded contacts are defined between screws, battery, frame, motor and blade. Moreover, a physical contact is defined between the lower portion of the drone and floor and between motor gaps. The drone arm and body is considered to be made of ABS Thermoplastic, screws and motor from Steel and battery from Aluminum.
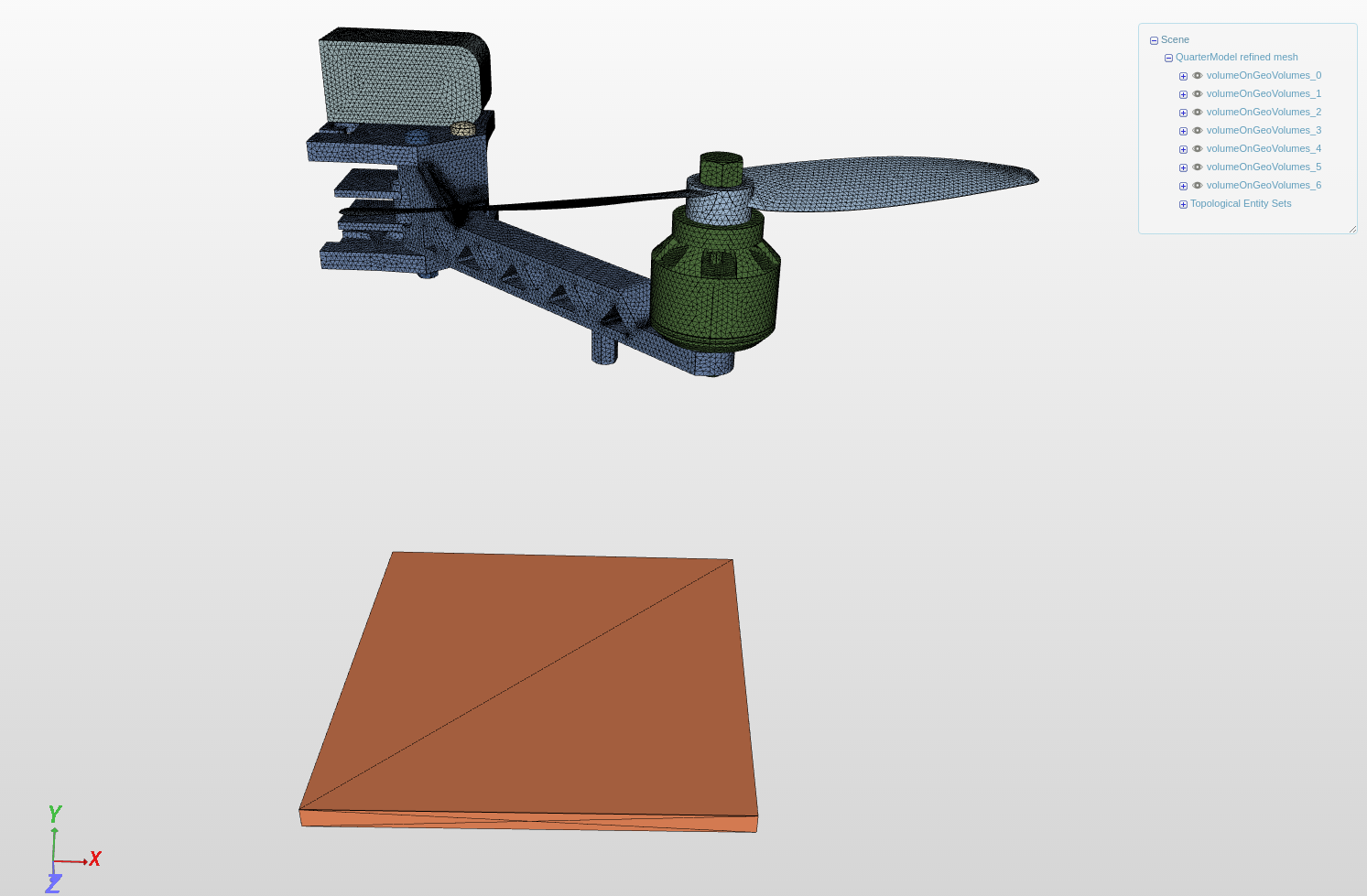
An initial velocity of 10 m/s (36 km/h) is given to drone in negative y-direction, whereas the plate is constrained in all directions making it rigid. Simulation is run for 0.015 s using a time definition via a table uploaded in order to have manual control over time stepping between different intervals. The simulation is run on 8 cores and takes around 35 min and 67 min to complete for moderate and refined mesh respectively.
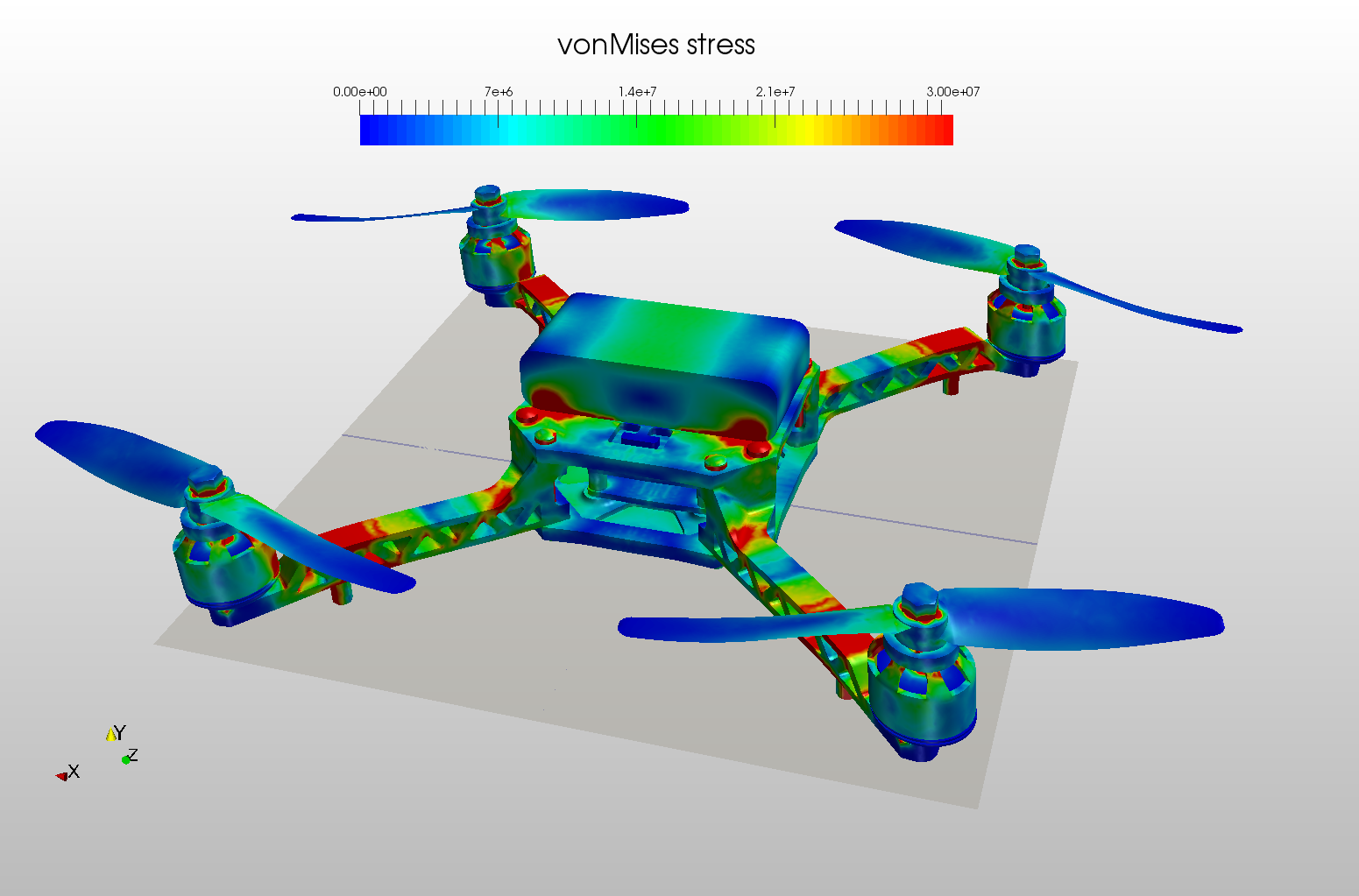
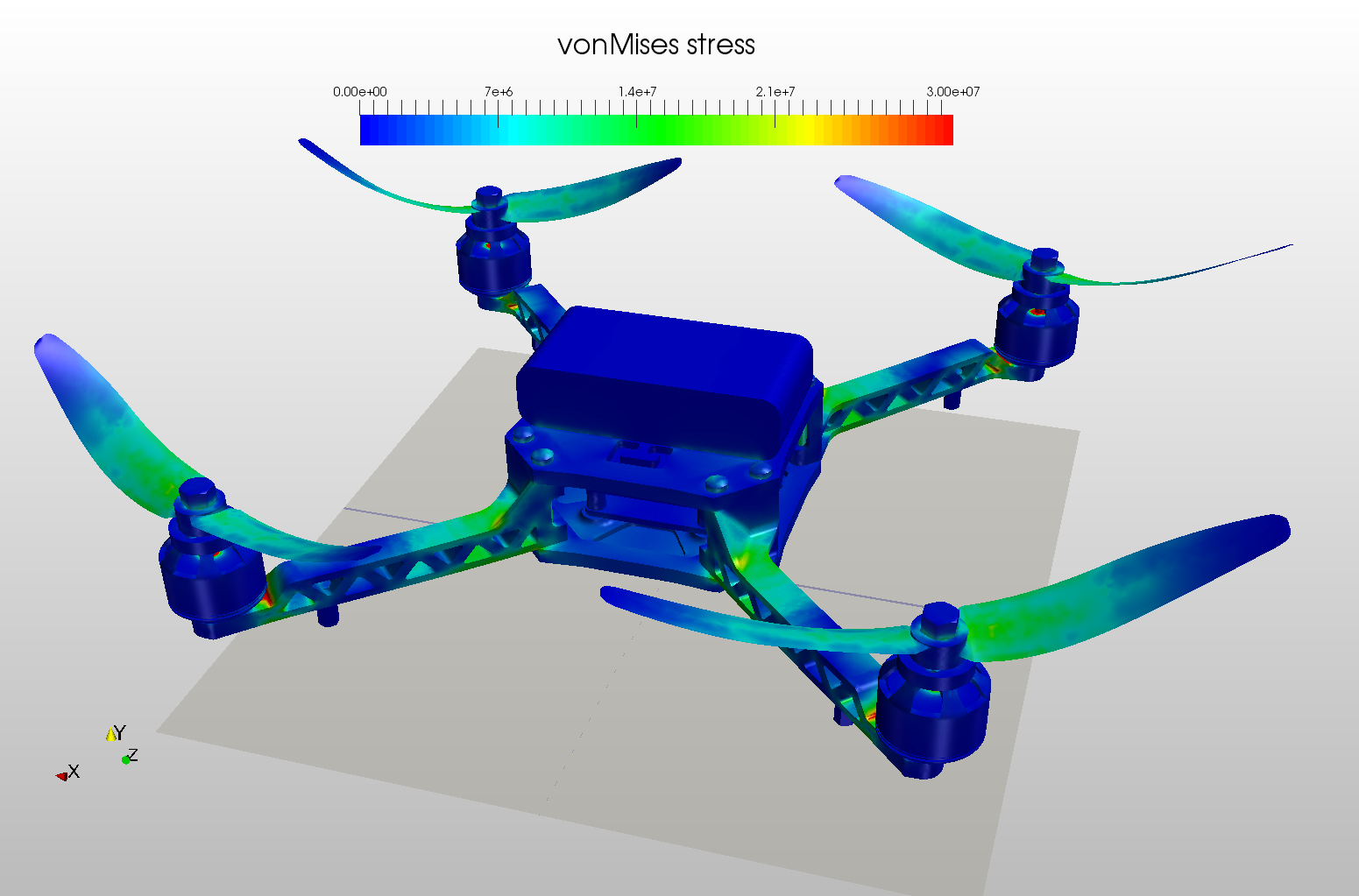
The figures below show the vonMises stress across the entire drone at 3 different intervals.

How can I get the results of drone at the moment touching the floor? Or the last GIF image? The reflection along a frame?
@hgurav for this you have to use locally Paraview… Use reflect filter to reflect along certain axis… Use WarpbyVector filter to see the movement of the drone… You can than save the animation
Good work Ahmed,
Could you contact me over Email: nebrassamir@gmail.com